
载荷机柜安装机器人末端执行机构控制系统设计的任务书.docx

骑着****猪猪


1/4

2/4

3/4

4/4
在线预览结束,喜欢就下载吧,查找使用更方便
相关资料

载荷机柜安装机器人末端执行机构控制系统设计的任务书.docx
载荷机柜安装机器人末端执行机构控制系统设计的任务书任务书:载荷机柜安装机器人末端执行机构控制系统设计一、任务背景随着现代工业的发展,机器人技术在工业自动化领域的应用越来越广泛。机器人在装配生产线上起到了重要的作用,可以有效地提高生产效率和质量,降低人工成本。在这些场景中,机器人末端执行机构必须能够精确地控制和操作载荷机柜等重型设备。因此,任务需要设计一种控制系统,使机器人末端执行机构能够在安装载荷机柜等重型设备的过程中,精确地负载和控制。二、任务要求本任务的目标是设计一种控制系统,使机器人末端执行机构能够

载荷机柜安装机器人末端执行机构控制系统设计的中期报告.docx
载荷机柜安装机器人末端执行机构控制系统设计的中期报告一、项目背景与意义:随着互联网和智能制造技术的快速发展,大数据技术在生产制造领域的应用愈加普及,生产制造水平也得到了显著提升。然而,传统生产制造技术由于其生产效率低、流程复杂、成本高等问题,已经逐渐不适应现代生产制造的发展要求。因此,机器人成为了现代生产制造中不可缺少的一部分,机器人模拟人的动作进行复杂的、重复性强的工作,可以提高生产效率,降低生产成本,减少人力资源的浪费和疲劳程度。随着机器人技术的进一步发展,机器人装载载荷机柜的应用不断增加,因此,本项
采样机器人末端执行机构.pdf
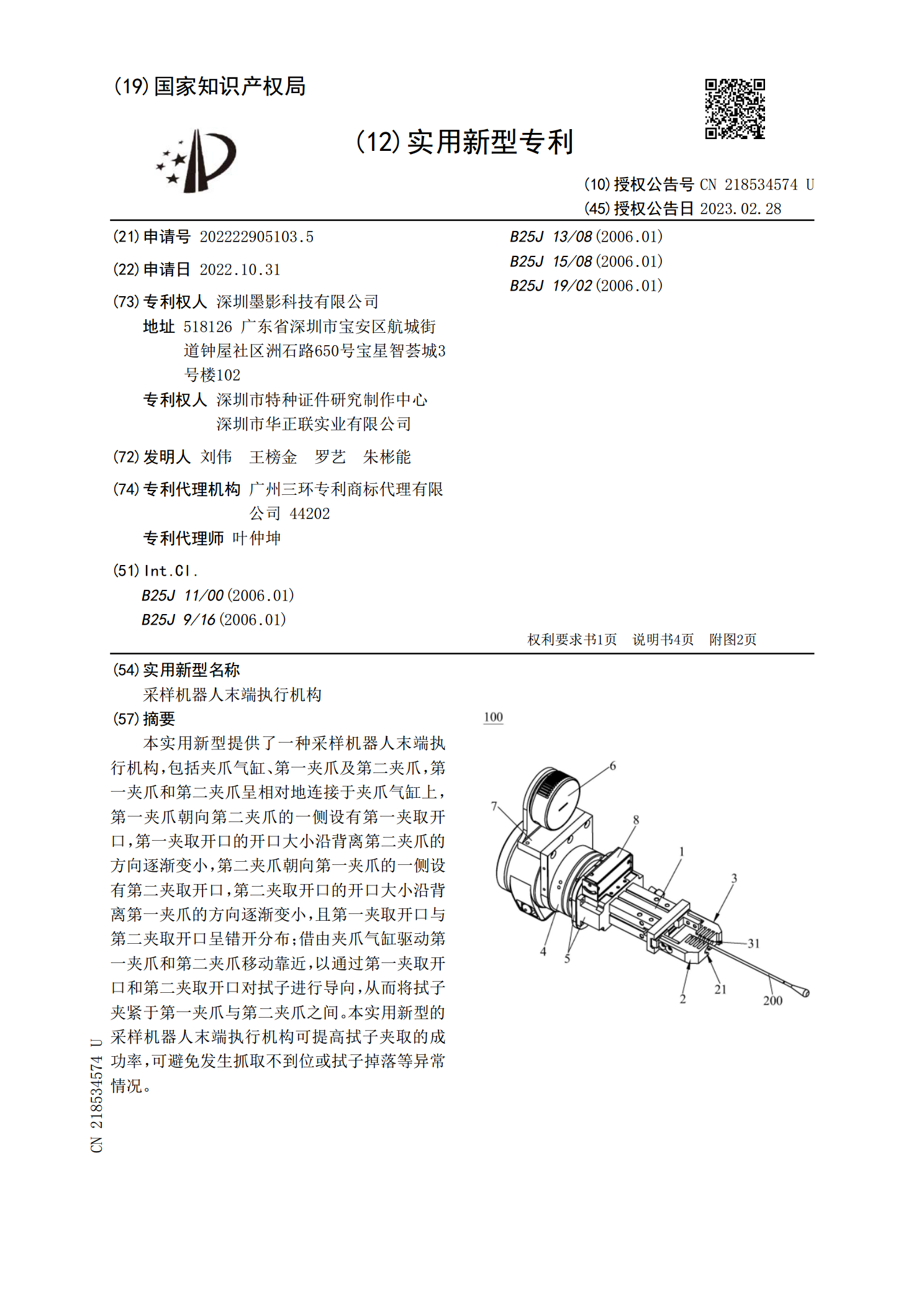
本实用新型提供了一种采样机器人末端执行机构,包括夹爪气缸、第一夹爪及第二夹爪,第一夹爪和第二夹爪呈相对地连接于夹爪气缸上,第一夹爪朝向第二夹爪的一侧设有第一夹取开口,第一夹取开口的开口大小沿背离第二夹爪的方向逐渐变小,第二夹爪朝向第一夹爪的一侧设有第二夹取开口,第二夹取开口的开口大小沿背离第一夹爪的方向逐渐变小,且第一夹取开口与第二夹取开口呈错开分布;借由夹爪气缸驱动第一夹爪和第二夹爪移动靠近,以通过第一夹取开口和第二夹取开口对拭子进行导向,从而将拭子夹紧于第一夹爪与第二夹爪之间。本实用新型的采样机器人末
腹腔微创手术机器人末端执行机构的设计和实现.pdf
第卷第〕,器人,年片机文章编号《又一《抖一腹腔微创手术机器人末端执行机构的设计和实现冯美,付宜利,潘博,朴明波哈尔滨工业人学机器人技术与系统国家重点实验室,黑龙江哈尔滨巧摘要为了提高腹腔微创手术的安全性,设计了一种新型的腹腔微创手术机器人末端执行机构,用于夹持手术器械根据腹腔微创手术的特点和技术要求,采用轴驱动和平行四杆的运动原理设计定点机构详细介绍了末端执行机构的机械结构,应用一法和矢量代数法给出了各个关节的运动学解公式,研究了控制系统的硬件结构和软件系统,并进行了样机实验实验表明所设计的末端执行机构具

末端执行机构及纵筋输送机器人.pdf
本发明涉及钢筋笼制造技术领域,提供一种末端执行机构以及纵筋输送机器人。末端执行机构用于夹取纵筋并能够使纵筋穿过至少一个箍筋,包括主动轮、用于驱动主动轮绕第一轴线做旋转运动的主动驱动组件、与主动轮上下对位设置的主压轮以及用于驱动主压轮相对主动轮上下移动的主压驱动组件,主动轮的外轮面和主压轮的外轮面能够共同用于夹持纵筋,主动轮在主动驱动组件的驱动下能够带动纵筋向左或向右移动,且主压轮在纵筋的带动下能够绕第二轴线做旋转运动,第一轴线和第二轴线均相对左右方向垂直设置。该末端执行机构不仅可实现纵筋的夹取作业,还可使