
面向步态康复训练的绳驱动并联机器人系统研究的任务书.docx

骑着****猪猪


1/3

2/3

3/3
在线预览结束,喜欢就下载吧,查找使用更方便
相关资料

面向步态康复训练的绳驱动并联机器人系统研究的任务书.docx
面向步态康复训练的绳驱动并联机器人系统研究的任务书一、研究背景步态康复是康复医学的一项重要领域,针对患者的步态恢复进行系统的康复方案,可以恢复患者正常的行走能力,提高生活质量。而机器人技术在步态康复训练中的应用已经得到广泛的关注,机器人可以帮助医生更好地控制治疗过程、提高治疗效果和调整康复方案。传统的机器人系统通常是串联机构,即每个关节都由一个电机驱动,这种机构的缺点是机械结构复杂、系统维护成本高、体积庞大等,很难满足步态康复训练的需要。因此,研究并联驱动机器人具有高效、快速、灵活、高重复性等优点,更能适

面向步态康复训练的绳驱动并联机器人系统研究的开题报告.docx
面向步态康复训练的绳驱动并联机器人系统研究的开题报告一、研究背景及意义步态康复是指针对因各种原因引起的下肢运动能力障碍而进行的训练,常见于脑卒中、脊髓损伤、关节置换等疾病的康复治疗过程中。目前,传统的步态康复训练主要依靠医师手工施加辅助力和操作康复装置等方式来完成,这种方式存在操作难度大、康复效果不稳定和康复训练过程中可能会对患者造成二次伤害等缺点。为了克服传统康复方式的缺点,研究者们开始探索利用智能机器人等技术来支持步态康复训练。其中,机器人的力控、运动控制等能力配合康复医疗专业人员的指导,能够有效地提

八绳驱动并联康复机器人控制方法研究的任务书.docx
八绳驱动并联康复机器人控制方法研究的任务书任务书:八绳驱动并联康复机器人控制方法研究一、研究背景与意义康复机器人是一种用来协助、改善、恢复运动功能障碍者生活能力的机器人。近年来,随着人口老龄化和慢性病患者数量的不断增加,康复机器人的需求量逐年增加,同时也受到了政府和社会的大力支持。八绳驱动并联康复机器人由于其良好的工作精度、良好的安全性和人性化的控制方式,已经成为康复机器人设计的研究热点之一。本研究旨在通过八绳驱动并联康复机器人的控制研究,提高机器人的控制精确度和真实性,探究康复机器人在实际康复治疗中的应
一种面向步态和平衡康复训练的单绳悬吊主动减重系统.pdf
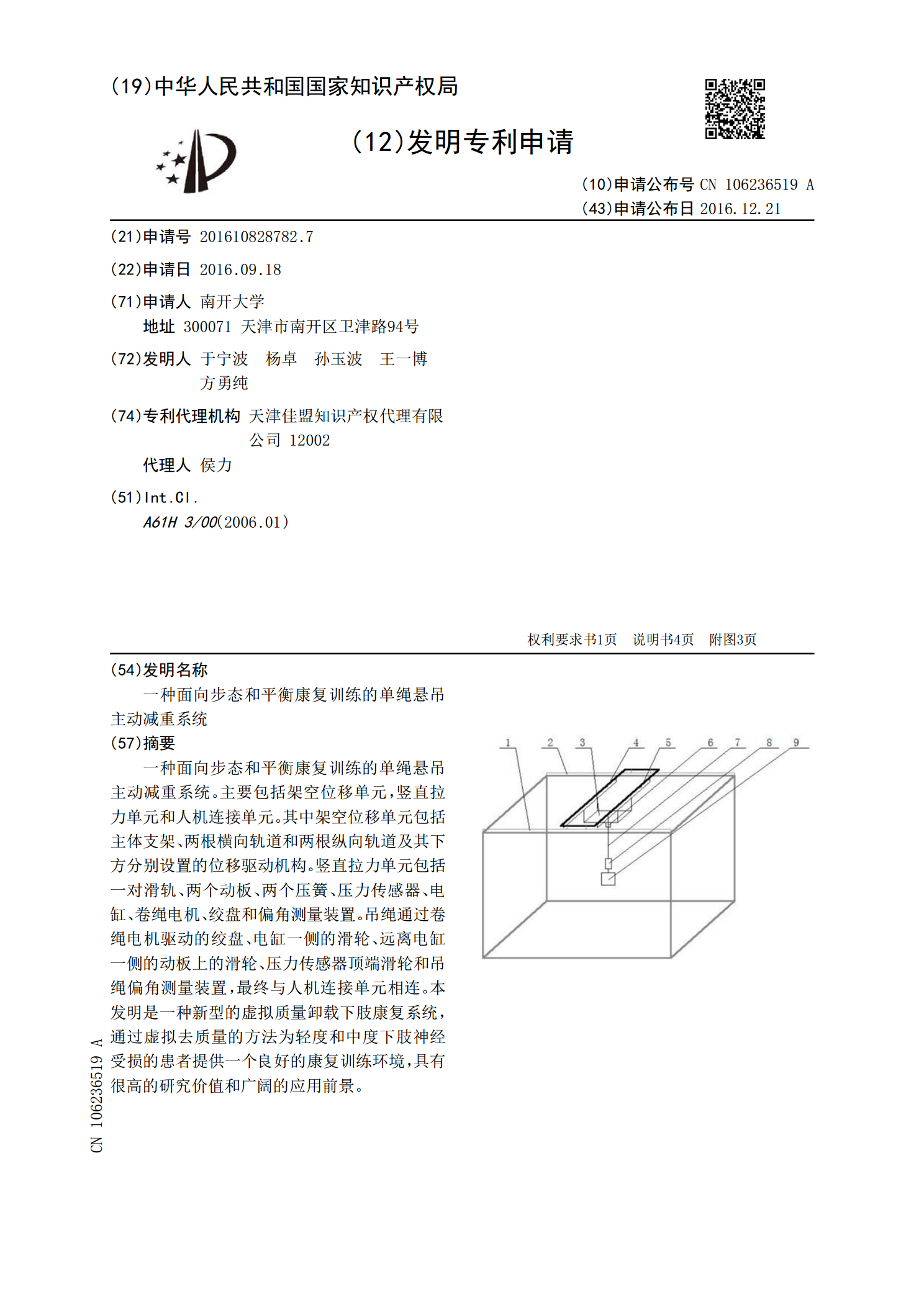
一种面向步态和平衡康复训练的单绳悬吊主动减重系统。主要包括架空位移单元,竖直拉力单元和人机连接单元。其中架空位移单元包括主体支架、两根横向轨道和两根纵向轨道及其下方分别设置的位移驱动机构。竖直拉力单元包括一对滑轨、两个动板、两个压簧、压力传感器、电缸、卷绳电机、绞盘和偏角测量装置。吊绳通过卷绳电机驱动的绞盘、电缸一侧的滑轮、远离电缸一侧的动板上的滑轮、压力传感器顶端滑轮和吊绳偏角测量装置,最终与人机连接单元相连。本发明是一种新型的虚拟质量卸载下肢康复系统,通过虚拟去质量的方法为轻度和中度下肢神经受损的患者

一种绳索驱动装置及绳驱并联机器人.pdf
本发明涉及机器人技术领域,公开了一种绳索驱动装置以及并联绳驱机器人。本发明的绳索驱动装置包括主体框架、固设于所述主体框架上的驱动装置、与所述驱动装置连接并同步转动的丝杆与铰轮、与所述丝杆螺纹连接的导绳滑块以及一端固定设于所述铰轮的上的控制绳索;其中,所述铰轮上设有供所述控制绳索绕卷的螺纹槽,所述导绳滑块上设有第一导绳滑轮,所述第一导绳滑轮将所述控制绳索张紧并使所述控制绳索定向绕入所述螺纹槽内。本发明的并联绳驱机器人包括机器人主体以及固设于机器人主体上的绳索驱动装置。本发明的绳索驱动装置以及并联绳驱机器人能