
柔性钩爪盘形足式爬壁机器人仿生机理与系统研究的任务书.docx

骑着****猪猪


1/3

2/3

3/3
在线预览结束,喜欢就下载吧,查找使用更方便
相关资料

柔性钩爪盘形足式爬壁机器人仿生机理与系统研究.docx
柔性钩爪盘形足式爬壁机器人仿生机理与系统研究柔性钩爪盘形足式爬壁机器人仿生机理与系统研究摘要:随着科技的不断发展,机器人技术也取得了突飞猛进的发展。爬壁机器人作为一种能够在垂直或倾斜表面上爬行的机器人,具有重要的实际应用价值。本论文研究了柔性钩爪盘形足式爬壁机器人,通过仿生机理的研究,设计了一种高效的机器人系统,具有较强的爬壁能力和适应性。关键词:柔性钩爪盘形足式爬壁机器人,仿生机理,系统研究一、引言随着科技的发展,机器人逐渐成为各个领域中不可或缺的一部分。爬壁机器人作为一种特殊类型的机器人,被广泛应用于

柔性钩爪盘形足式爬壁机器人仿生机理与系统研究的任务书.docx
柔性钩爪盘形足式爬壁机器人仿生机理与系统研究的任务书一、任务背景钩爪盘形足是一种十分优秀的触觉机械构造,在许多生物种类上都发现到此类足的存在,比如蜥蜴、蟋蟀等。利用此类足的优势,研发钩爪盘形足式爬壁机器人可以有效地在室外、高空、深海等危险环境中,执行人类难以达到的任务,比如搜救、勘探等。而且,钩爪盘形足在爬行过程中其可塑性强、精细度高、效率高等优点使其成为仿生学和机器人领域的一个研究热点。因此,本任务的主要目的就是设计、分析、仿真并优化一款柔性钩爪盘形足式爬壁机器人,实现其在不同场景下的高效运动。二、任务

基于柔性钩爪足的仿生爬壁机器人的步态设计与足端轨迹规划的任务书.docx
基于柔性钩爪足的仿生爬壁机器人的步态设计与足端轨迹规划的任务书任务书一、任务背景仿生学是一门综合性科学,通过对生命体的结构和功能的研究,以及对自然生态系统的模拟和仿真,实现技术的创新和发展。随着现代科学技术的发展和人们对自然界认知的不断深入,仿生学已经成为一个热门的研究领域。在仿生学中,仿生机器人是一种能够模仿和复制人体或者动物的结构和动作的机器人技术。在工业、医疗、教育、军事、救援等领域中,仿生机器人都有着广泛的应用。爬壁机器人是一种特殊的仿生机器人,具有攀爬在不同类型表面(例如平面、直壁和弯曲的表面)
钩爪式六足爬壁机器人及其运动方法.pdf
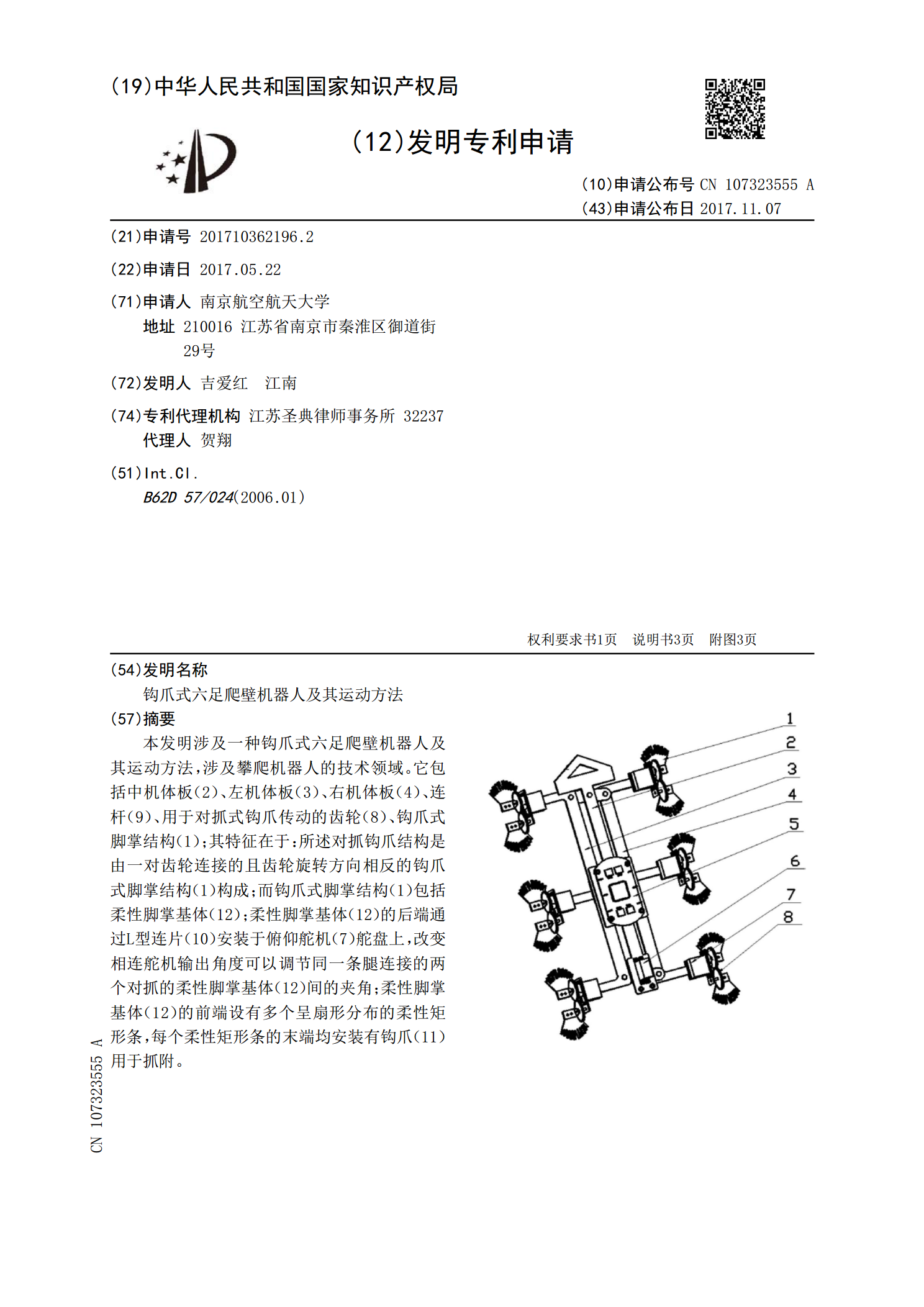
本发明涉及一种钩爪式六足爬壁机器人及其运动方法,涉及攀爬机器人的技术领域。它包括中机体板(2)、左机体板(3)、右机体板(4)、连杆(9)、用于对抓式钩爪传动的齿轮(8)、钩爪式脚掌结构(1);其特征在于:所述对抓钩爪结构是由一对齿轮连接的且齿轮旋转方向相反的钩爪式脚掌结构(1)构成;而钩爪式脚掌结构(1)包括柔性脚掌基体(12);柔性脚掌基体(12)的后端通过L型连片(10)安装于俯仰舵机(7)舵盘上,改变相连舵机输出角度可以调节同一条腿连接的两个对抓的柔性脚掌基体(12)间的夹角;柔性脚掌基体(12)

爪刺式爬壁机器人仿生机理与系统研究的任务书.docx
爪刺式爬壁机器人仿生机理与系统研究的任务书任务书:爪刺式爬壁机器人仿生机理与系统研究1.背景爬壁机器人是一种能够在垂直墙壁表面行走的机器人,具有在高空悬崖、防火墙等复杂环境下进行检测、救援和维护等任务的能力。而爪刺式爬壁机器人则是近年来新兴的一种爬壁机器人,具有稳定性好、能力强等优点,因此备受研究者的关注。然而,爪刺式爬壁机器人在实现高精度、高效率运动的同时,需要综合考虑多种因素,例如摩擦力、剪切力等,而且其相关机理和系统还需要进一步研究和探讨。2.研究内容本次研究旨在通过对爪刺式爬壁机器人的仿生机理和系