
基于邻域系统和软优化的智能车自动倒车控制算法的任务书.docx

骑着****猪猪


1/3

2/3

3/3
在线预览结束,喜欢就下载吧,查找使用更方便
相关资料

基于邻域系统和软优化的智能车自动倒车控制算法的任务书.docx
基于邻域系统和软优化的智能车自动倒车控制算法的任务书任务书题目:基于邻域系统和软优化的智能车自动倒车控制算法选题背景:车辆在城市交通和停车场等环境中的行驶是一项极其复杂和困难的任务。特别是在停车场环境中,驾驶员往往需要进行倒车以将车辆停放在适当的位置。然而,由于驾驶技术的限制和环境的复杂性,很容易出现倒车过程中出现刮擦,碰撞等问题,对车辆和人员造成安全隐患。因此,设计一种智能车自动倒车控制算法,可以帮助驾驶员减少倒车过程中的操作复杂度,提高安全性,减少伤害和车辆维修费用,具有重要的现实意义。任务描述:本项

基于邻域系统和软优化的智能车自动倒车控制算法的开题报告.docx
基于邻域系统和软优化的智能车自动倒车控制算法的开题报告一、选题背景随着汽车普及率的不断提高,每天都有大量的车辆进出停车场或道路上的停车位,而自动倒车技术在现代汽车生产中的应用已成为一项重要的技术,它可以大大提高汽车停车的安全性和效率。因此,探索一种新的自动倒车控制算法可以提高汽车的自动驾驶安全性和效率,从而满足人们的需求。二、选题意义当前,针对自动倒车技术的研究主要采用传统控制算法和传感器技术实现。但是,这种方法存在许多问题,包括控制精度不高、反应速度慢和系统可扩展性差等。基于邻域系统和软优化的自动倒车控

基于邻域系统控制的智能车倒车入库算法.docx
基于邻域系统控制的智能车倒车入库算法现代社会中,交通工具已经成为人们生活不可或缺的一部分,其中汽车作为主要交通工具之一,其使用频率和数量不断增加。然而,随着城市车辆拥堵和停车资源短缺问题的加剧,倒车入库成为了一个不可或缺的技能。因此,研究如何利用邻域系统控制的智能车倒车入库算法具有重要的现实意义。邻域系统控制是一种利用负反馈控制策略改善系统的性能的方法。倒车入库过程中,车辆需要一系列的转向和移动操作,这些操作需要根据车辆的位置和状态实时调整。邻域系统控制算法通过对车辆位置和状态数据进行实时监测和分析,可以

基于智能控制算法的列车自动驾驶系统的优化研究的任务书.docx
基于智能控制算法的列车自动驾驶系统的优化研究的任务书任务书:基于智能控制算法的列车自动驾驶系统的优化研究一、任务背景近年来,列车自动驾驶技术得到了越来越广泛的开发和应用,解决了传统运营模式下存在的人工控制问题,提升了列车的安全性和效率。然而,目前的列车自动驾驶系统普遍存在的问题是,其采用的控制算法存在缺陷,不能有效应对各种复杂的情况,导致系统性能和稳定性难以保障。为了解决这个问题,本次任务旨在基于智能控制算法对列车自动驾驶系统进行优化,提高其系统性能和稳定性,从而更好地满足实际应用的要求。二、任务目标1.
一种基于参数自动优化的控制算法的智能车及其控制方法.pdf
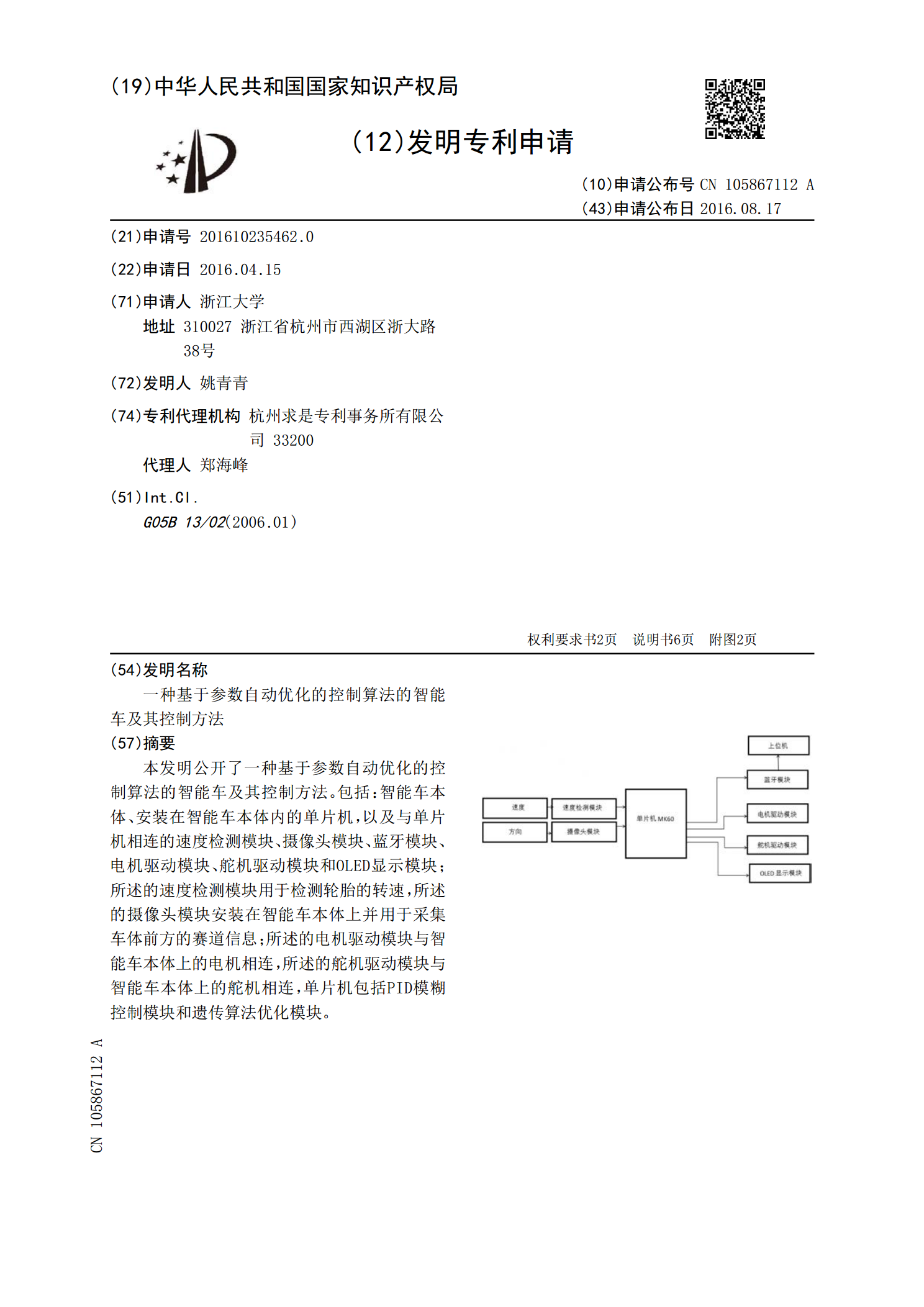
本发明公开了一种基于参数自动优化的控制算法的智能车及其控制方法。包括:智能车本体、安装在智能车本体内的单片机,以及与单片机相连的速度检测模块、摄像头模块、蓝牙模块、电机驱动模块、舵机驱动模块和OLED显示模块;所述的速度检测模块用于检测轮胎的转速,所述的摄像头模块安装在智能车本体上并用于采集车体前方的赛道信息;所述的电机驱动模块与智能车本体上的电机相连,所述的舵机驱动模块与智能车本体上的舵机相连,单片机包括PID模糊控制模块和遗传算法优化模块。