
一种基于参数自动优化的控制算法的智能车及其控制方法.pdf

书生****12

1/10
2/10
3/10
4/10
5/10
6/10
7/10
8/10
9/10
10/10
亲,该文档总共11页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料
一种基于参数自动优化的控制算法的智能车及其控制方法.pdf
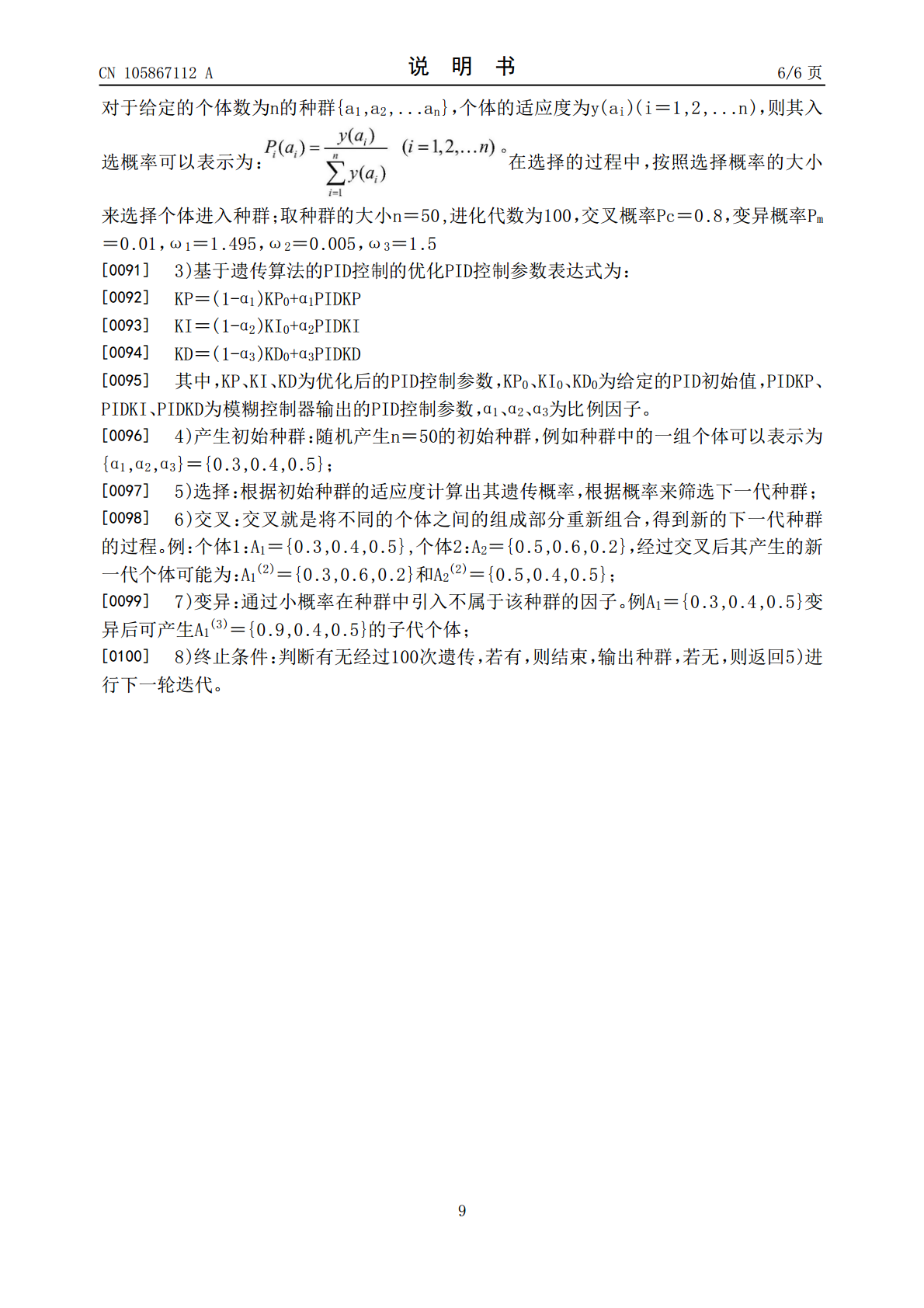
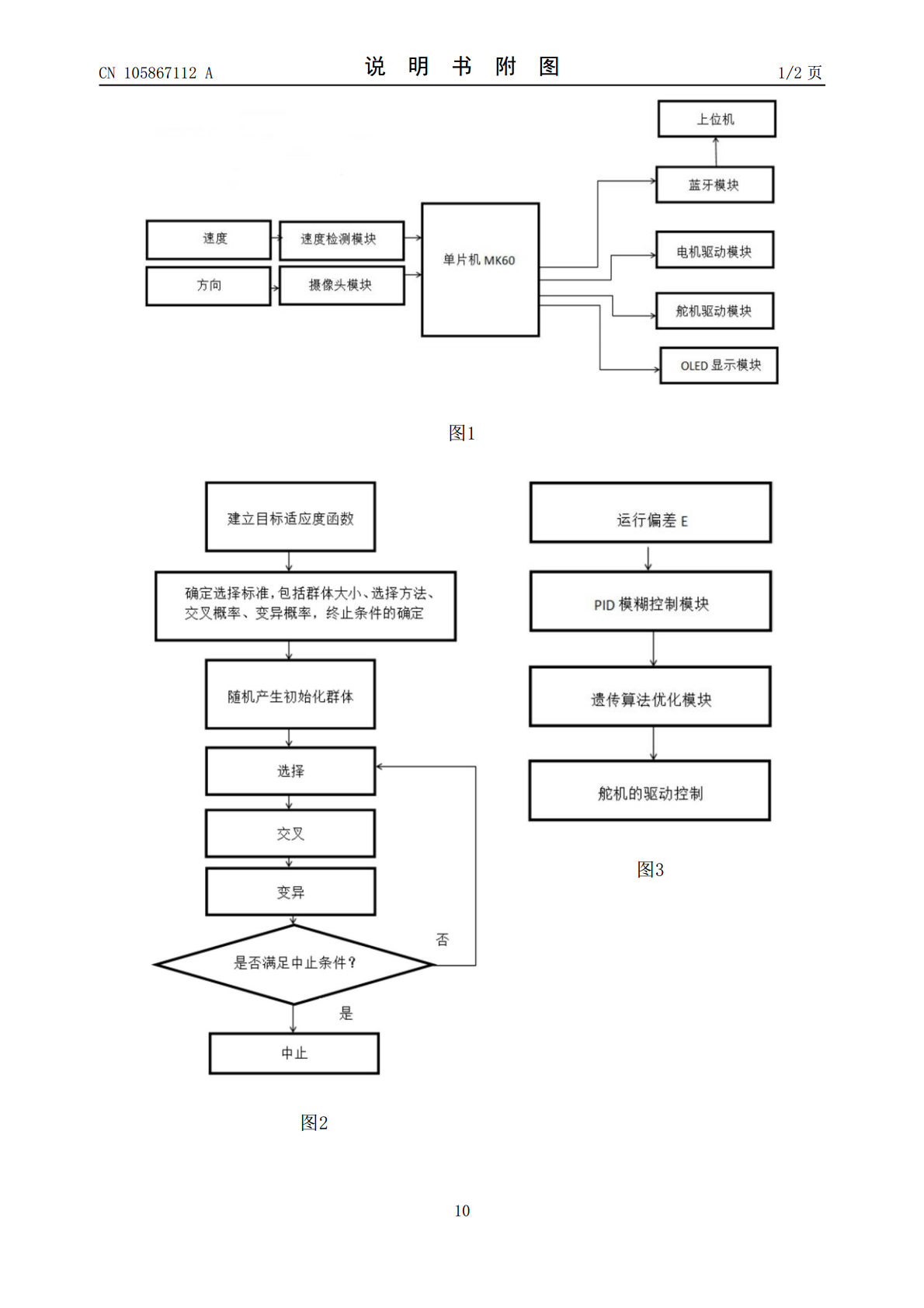
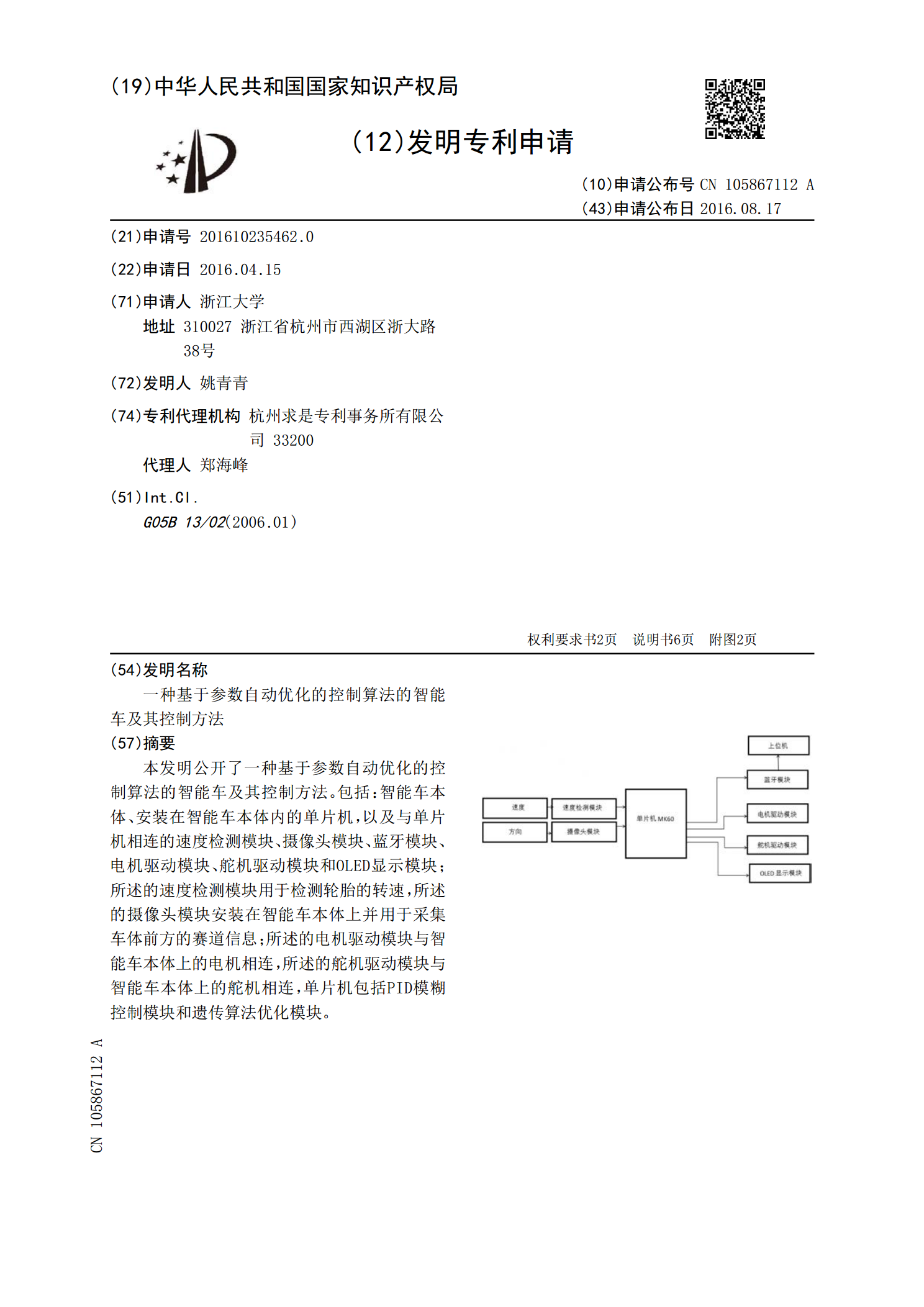
本发明公开了一种基于参数自动优化的控制算法的智能车及其控制方法。包括:智能车本体、安装在智能车本体内的单片机,以及与单片机相连的速度检测模块、摄像头模块、蓝牙模块、电机驱动模块、舵机驱动模块和OLED显示模块;所述的速度检测模块用于检测轮胎的转速,所述的摄像头模块安装在智能车本体上并用于采集车体前方的赛道信息;所述的电机驱动模块与智能车本体上的电机相连,所述的舵机驱动模块与智能车本体上的舵机相连,单片机包括PID模糊控制模块和遗传算法优化模块。
一种远程智能控制全自动锅炉车及其控制方法.pdf
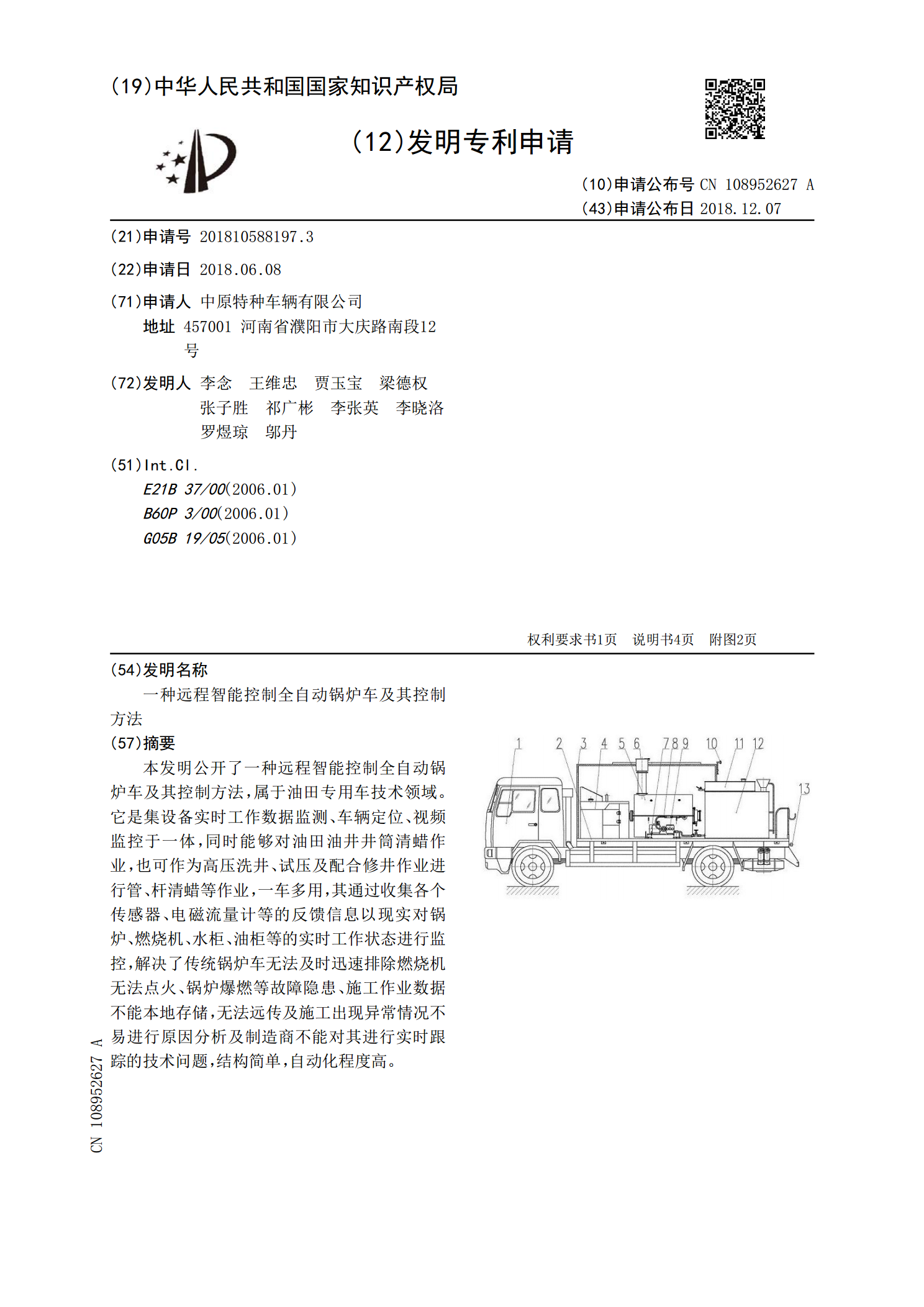
本发明公开了一种远程智能控制全自动锅炉车及其控制方法,属于油田专用车技术领域。它是集设备实时工作数据监测、车辆定位、视频监控于一体,同时能够对油田油井井筒清蜡作业,也可作为高压洗井、试压及配合修井作业进行管、杆清蜡等作业,一车多用,其通过收集各个传感器、电磁流量计等的反馈信息以现实对锅炉、燃烧机、水柜、油柜等的实时工作状态进行监控,解决了传统锅炉车无法及时迅速排除燃烧机无法点火、锅炉爆燃等故障隐患、施工作业数据不能本地存储,无法远传及施工出现异常情况不易进行原因分析及制造商不能对其进行实时跟踪的技术问题,

基于邻域系统和软优化的智能车自动倒车控制算法的开题报告.docx
基于邻域系统和软优化的智能车自动倒车控制算法的开题报告一、选题背景随着汽车普及率的不断提高,每天都有大量的车辆进出停车场或道路上的停车位,而自动倒车技术在现代汽车生产中的应用已成为一项重要的技术,它可以大大提高汽车停车的安全性和效率。因此,探索一种新的自动倒车控制算法可以提高汽车的自动驾驶安全性和效率,从而满足人们的需求。二、选题意义当前,针对自动倒车技术的研究主要采用传统控制算法和传感器技术实现。但是,这种方法存在许多问题,包括控制精度不高、反应速度慢和系统可扩展性差等。基于邻域系统和软优化的自动倒车控

基于PSO优化算法的重载机械臂载荷参数自动控制方法.docx
基于PSO优化算法的重载机械臂载荷参数自动控制方法基于PSO优化算法的重载机械臂载荷参数自动控制方法摘要:机械臂作为一种广泛应用于工业领域的装置,其承载能力和工作效率对于生产效益至关重要。本论文提出了一种基于粒子群优化(PSO)算法的重载机械臂载荷参数自动控制方法,该方法通过优化机械臂的载荷参数,实现对机械臂承载能力的最大化和控制精度的提高。实验结果表明,该方法能够有效地优化机械臂载荷参数,提高其工作效率和负载承载能力。1.引言机械臂是一种广泛应用于工业领域的装置,它可以模拟人手的运动,并且能够在各种环境

基于邻域系统和软优化的智能车自动倒车控制算法的任务书.docx
基于邻域系统和软优化的智能车自动倒车控制算法的任务书任务书题目:基于邻域系统和软优化的智能车自动倒车控制算法选题背景:车辆在城市交通和停车场等环境中的行驶是一项极其复杂和困难的任务。特别是在停车场环境中,驾驶员往往需要进行倒车以将车辆停放在适当的位置。然而,由于驾驶技术的限制和环境的复杂性,很容易出现倒车过程中出现刮擦,碰撞等问题,对车辆和人员造成安全隐患。因此,设计一种智能车自动倒车控制算法,可以帮助驾驶员减少倒车过程中的操作复杂度,提高安全性,减少伤害和车辆维修费用,具有重要的现实意义。任务描述:本项