
基于ARM+DSP的捷联航姿系统设计的任务书.docx

骑着****猪猪


1/3

2/3

3/3
在线预览结束,喜欢就下载吧,查找使用更方便
相关资料

基于ARM+DSP的捷联航姿系统设计的任务书.docx
基于ARM+DSP的捷联航姿系统设计的任务书一、任务背景随着人类社会的发展,航空技术在各个领域都得到了广泛的应用。其中,航空姿态控制系统是航空控制技术中的关键技术之一,它的主要任务是实现飞行器在空中的准确控制和稳定运行。在航空姿态控制系统中,姿态传感器是非常重要的组成部分。目前,惯性测量单元(IMU)是姿态传感器的主要形式之一。随着芯片技术的发展,现在可以实现在一颗芯片上同时集成ARM和DSP两个处理器,这种技术被称为SoC(System-on-Chip)技术。SoC技术的应用为姿态控制系统的设计和实现提
基于MBSE模型的机载光纤捷联航姿系统的设计方法.pdf
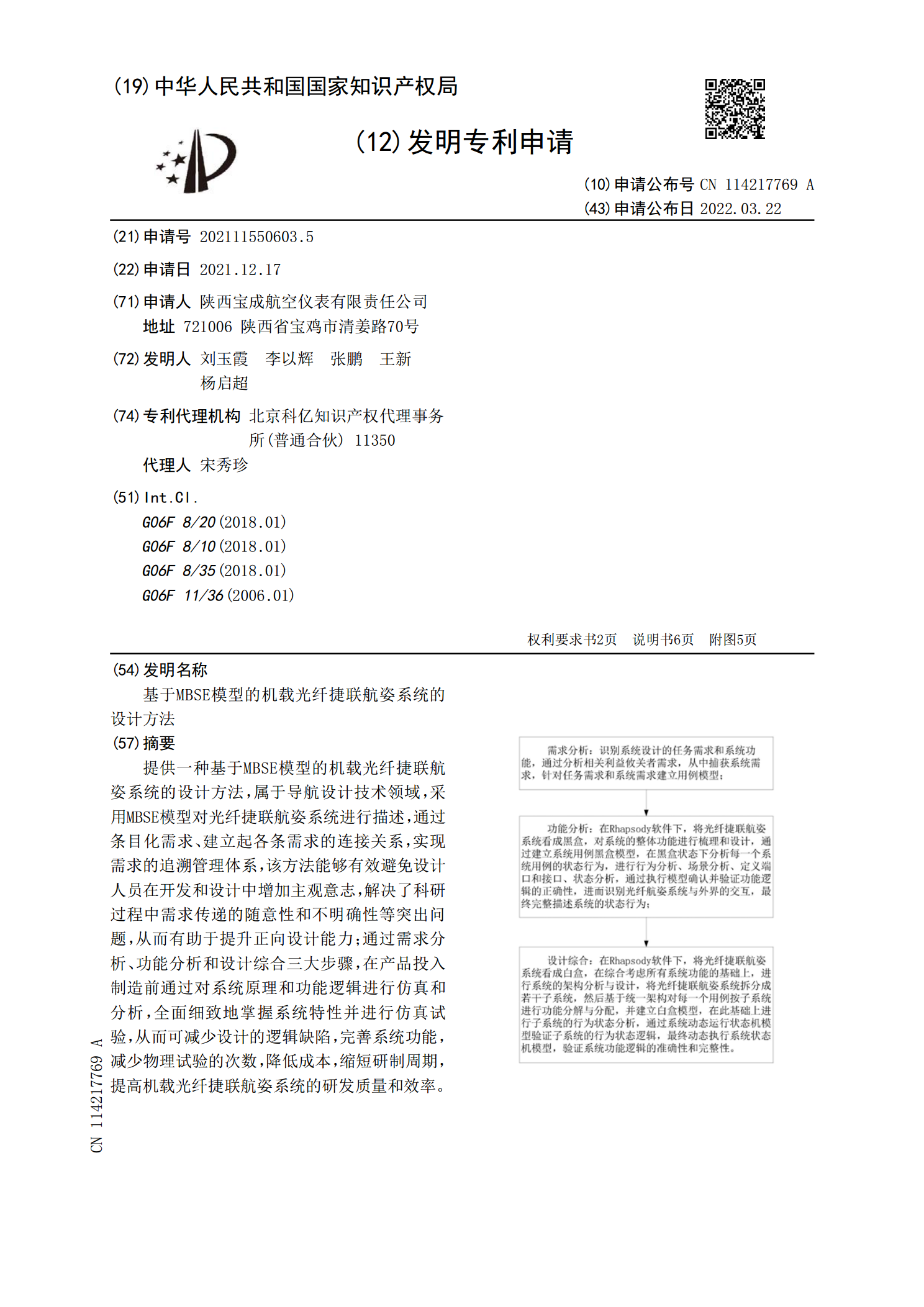
提供一种基于MBSE模型的机载光纤捷联航姿系统的设计方法,属于导航设计技术领域,采用MBSE模型对光纤捷联航姿系统进行描述,通过条目化需求、建立起各条需求的连接关系,实现需求的追溯管理体系,该方法能够有效避免设计人员在开发和设计中增加主观意志,解决了科研过程中需求传递的随意性和不明确性等突出问题,从而有助于提升正向设计能力;通过需求分析、功能分析和设计综合三大步骤,在产品投入制造前通过对系统原理和功能逻辑进行仿真和分析,全面细致地掌握系统特性并进行仿真试验,从而可减少设计的逻辑缺陷,完善系统功能,减少物理

基于光纤陀螺仪的捷联航姿系统研究与设计的任务书.docx
基于光纤陀螺仪的捷联航姿系统研究与设计的任务书任务书1.研究背景和意义随着空气航空技术的发展,飞行器的性能和安全性成为了更为关注的问题。其中,飞行器的捷联航姿系统是航空器的重要组成部分之一,它可以通过接收姿态、加速度等信息进行控制和稳定,保证飞行器的安全性和舒适性。因此,捷联航姿系统的研究和设计具有重要的实际意义。光纤陀螺仪是目前广泛应用于惯性导航系统、惯性测量和控制系统中的一种惯性测量元件,具有高精度、高稳定性、高速度响应等优点。光纤陀螺仪可以实现对角速度的测量,能够广泛应用于航空、航天、航海及地面测绘

基于MEMS的捷联航姿系统初始对准技术研究.docx
基于MEMS的捷联航姿系统初始对准技术研究摘要MEMS技术在飞行控制中的应用越来越广泛,其中包括捷联航姿系统。捷联航姿系统可以提供飞行器的方向、位置和速度等信息,但需要进行初始对准。本文着重研究基于MEMS的捷联航姿系统初始对准技术,分析其工作原理和算法流程,讨论问题并提出解决方案,最终得到高精度的初始姿态估计结果。实验结果表明,该技术具有高精度、高效率的特点,是一种可靠的初始对准方法。关键词:MEMS、捷联航姿系统、初始对准、姿态估计、飞行控制引言现代飞行器对姿态系统的要求不断提高,因为它可以提供基本的

基于捷联航姿系统的舰船瞬时线运动信息测量研究的任务书.docx
基于捷联航姿系统的舰船瞬时线运动信息测量研究的任务书任务名称:基于捷联航姿系统的舰船瞬时线运动信息测量研究任务背景:随着航海业的发展,越来越多的重要任务需要舰船完成,如海洋资源开发、沿海巡逻、军事演习等。为了保证船只的安全和任务的顺利执行,需要对船只的瞬时线运动进行准确测量。目前,传统的船舶运动监测系统精度不高,不能满足实际需求,因此需要开展基于捷联航姿系统的舰船瞬时线运动信息测量研究。任务目标:本研究旨在开展基于捷联航姿系统的舰船瞬时线运动信息测量研究,主要包括以下目标:1.确定适用于舰船的捷联航姿系统