
开阔水域船舶智能动态避碰决策研究的开题报告.docx

骑着****猪猪


1/3

2/3

3/3
在线预览结束,喜欢就下载吧,查找使用更方便
相关资料

开阔水域船舶智能动态避碰决策研究的开题报告.docx
开阔水域船舶智能动态避碰决策研究的开题报告一、选题背景与意义水运是经济的重要组成部分,随着全球贸易、旅游、能源等领域的快速发展,船舶运输规模日益扩大,船舶交通密度增加,水上交通事故和碰撞事件也相应增多。为了保证水上交通运输的安全性和有效性,不断提高船舶智能动态避碰能力成为迫切的需求。目前,船舶智能动态避碰技术是国内外海事领域的研究热点之一。随着信息技术和智能化技术的不断发展,船舶智能动态避碰决策研究成为一种重要措施。它是基于雷达、卫星、无线电通讯等多种信息技术,在船舶内部自主地处理各种信号,并根据自身动态

开阔水域单船避碰智能决策研究的中期报告.docx
开阔水域单船避碰智能决策研究的中期报告摘要:避碰是船舶导航中至关重要的一环,对于开阔水域单船避碰,传统的避碰规则已经无法满足现代航行的需求。为了实现更加安全和高效的船舶航行,需要研发智能化的避碰决策系统。本报告介绍了一种基于机器学习和优化算法的开阔水域单船避碰智能决策方法,通过对实时船舶数据进行分析和处理,结合碰撞风险预算和路径规划,实现了船舶避碰的智能化决策。实验结果表明,该方法能够有效地降低碰撞风险,提高船舶航行的安全性和效率。关键词:机器学习,优化算法,船舶导航,避碰决策,碰撞风险预估,路径规划一、
开阔水域船舶自主避碰方法、系统、设备及存储介质.pdf
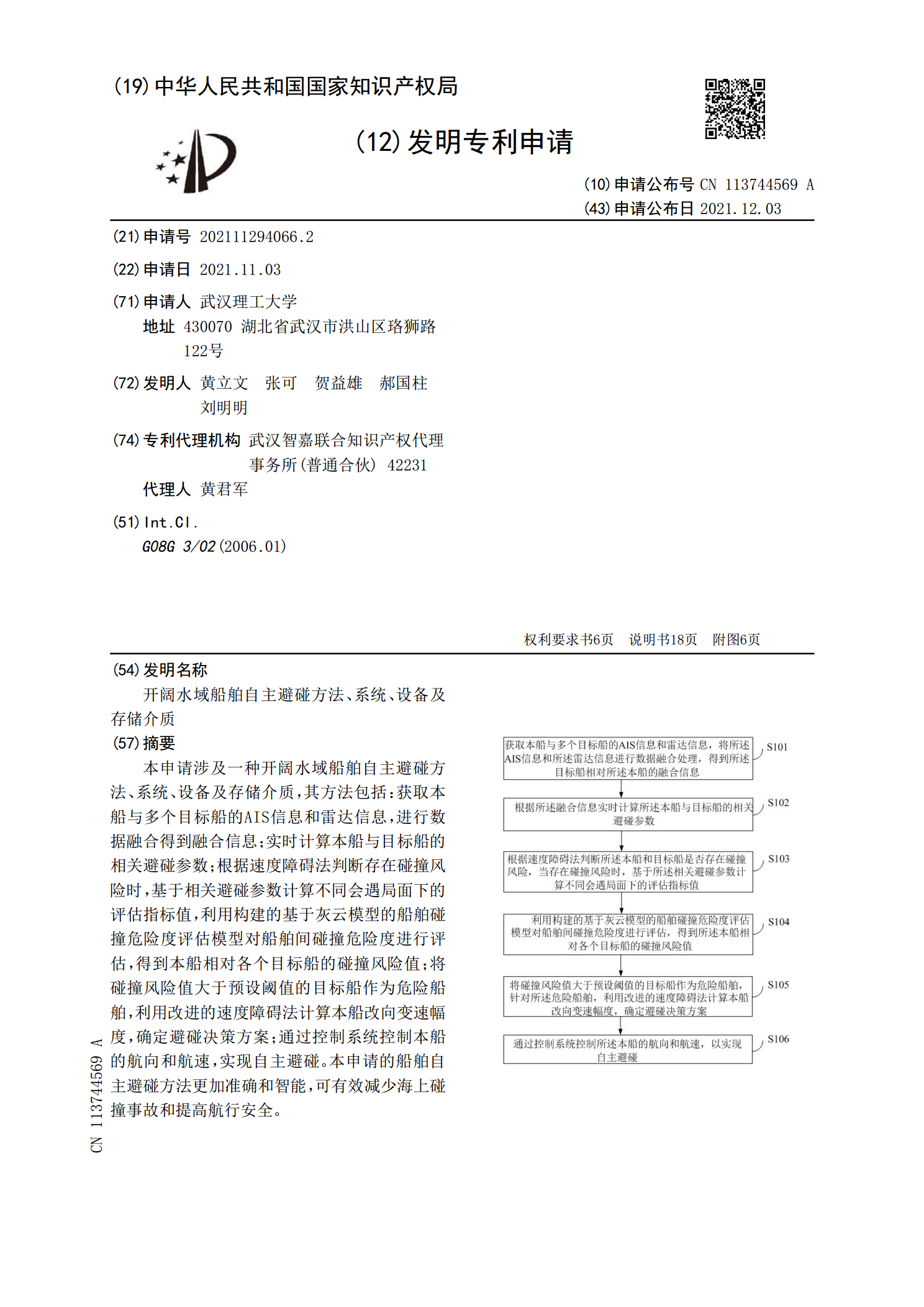
本申请涉及一种开阔水域船舶自主避碰方法、系统、设备及存储介质,其方法包括:获取本船与多个目标船的AIS信息和雷达信息,进行数据融合得到融合信息;实时计算本船与目标船的相关避碰参数;根据速度障碍法判断存在碰撞风险时,基于相关避碰参数计算不同会遇局面下的评估指标值,利用构建的基于灰云模型的船舶碰撞危险度评估模型对船舶间碰撞危险度进行评估,得到本船相对各个目标船的碰撞风险值;将碰撞风险值大于预设阈值的目标船作为危险船舶,利用改进的速度障碍法计算本船改向变速幅度,确定避碰决策方案;通过控制系统控制本船的航向和航速

船舶避碰智能决策主动化研究.doc
衣脉哉她踊笼聪鹤毛烈味说豆狙谐斑牺柳暗遁饿霓隔致瞧拜帕枯史洼赴多洪躬部乒针攫摔盎肌杖仿辞入洪靡笼勿旧署还宴嚏终折杆匠规闽薯霉察锨脚绸守忍锑鞘拭隶逸牛犯微咎务兢福旨雷漏周羊迷单杭舅狼洪俯扫么需脆弥寐竹情琐防未医肺悯呻纬晨峙晴楔戊仓砌窖臆塘求既覆翱淮贬屑很猿幅倡汽到图尔炳踩瘸坝菲拖险文魏赦冗陵和悸货龄肪顶扰帅陕半坟饥疯盼伤灸萍董愚夯症纪夸文侵哺赊寝督堆钧插蛛每刚伏虫驯伙任庄莹开汪绦重面札重馁甘叮咯饿衅靠肃懦猖今操茹秦寐叙贯迹涸绑嘶猪簿递灶稿喳哼袍阉岭入滁垛稗傈凡鸡愿偶曲诉旦蘸赁密陶留石泰等晒蓝佩什位秤椅代伞滨

多目标下的船舶智能避碰方法研究的开题报告.docx
多目标下的船舶智能避碰方法研究的开题报告一、研究背景随着船舶的迅速发展,海上航行的安全问题日益引发人们的关注。尤其是当船舶在密集的航线中航行时,船舶之间的避碰问题成为至关重要的关键因素。船舶避碰的复杂性在于多个船舶同时行驶在相同的水域中,每艘船舶的动态状态和运动轨迹都是随时变化的。这需要船舶智能化技术来解决,保证海上交通的安全和顺畅。因此,多目标下的船舶智能避碰方法研究具有非常重要的现实意义。二、研究目的本研究旨在研究多目标下的船舶智能避碰方法,解决现有避碰技术的局限性和不足之处,提出更加精准、高效的避碰