
基于双目视觉的管路位姿测量.pptx

快乐****蜜蜂

1/10

2/10

3/10
4/10

5/10

6/10

7/10

8/10

9/10
10/10
亲,该文档总共25页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料

基于双目视觉的管路位姿测量.pptx
汇报人:/目录0102立体视觉原理双目视觉系统组成双目视觉测量原理03管路位姿的定义管路位姿测量的重要性基于双目视觉的管路位姿测量方法04硬件系统设计软件系统设计系统标定与校准05实验环境与设备实验过程与数据采集数据分析与处理结果对比与误差分析06在工业领域的应用前景在其他领域的应用可能性未来研究方向与展望汇报人:
基于双目视觉的水下连接器位姿测量方法.pptx
,目录PartOnePartTwo立体视觉原理相机标定技术图像处理算法特征点匹配与空间定位PartThree光源选择与优化图像采集系统设计水下图像增强技术抗干扰措施与稳定性分析PartFour连接器模型建立与坐标系定义位姿测量算法流程关键参数计算与误差分析位姿精度验证与实验结果PartFive系统硬件组成与选型软件平台搭建与算法集成应用案例展示与效果评估实际应用中可能遇到的问题及解决方案PartSix与传统测量方法的比较技术创新点与优势分析存在的局限性及改进方向在不同领域的应用前景与拓展空间PartSev

基于双目视觉的机器人加工系统位姿测量技术研究.docx
基于双目视觉的机器人加工系统位姿测量技术研究标题:基于双目视觉的机器人加工系统位姿测量技术研究摘要:随着机器人技术的不断发展,机器人在工业生产中的应用越来越广泛。机器人加工系统是其中的重要应用之一,准确的位姿测量技术对于机器人加工系统的精确操作和高效性能至关重要。本文主要研究并探讨了基于双目视觉的机器人加工系统位姿测量技术。引言:在机器人加工系统中,位姿测量是机器人定位和导航的关键环节,对于机器人的精确操作和高质量的加工效果至关重要。传统的位姿测量方法包括激光测距、摄像头测量等,但这些方法存在一定的局限性
基于视觉与位姿融合的动态测量头盔.pdf
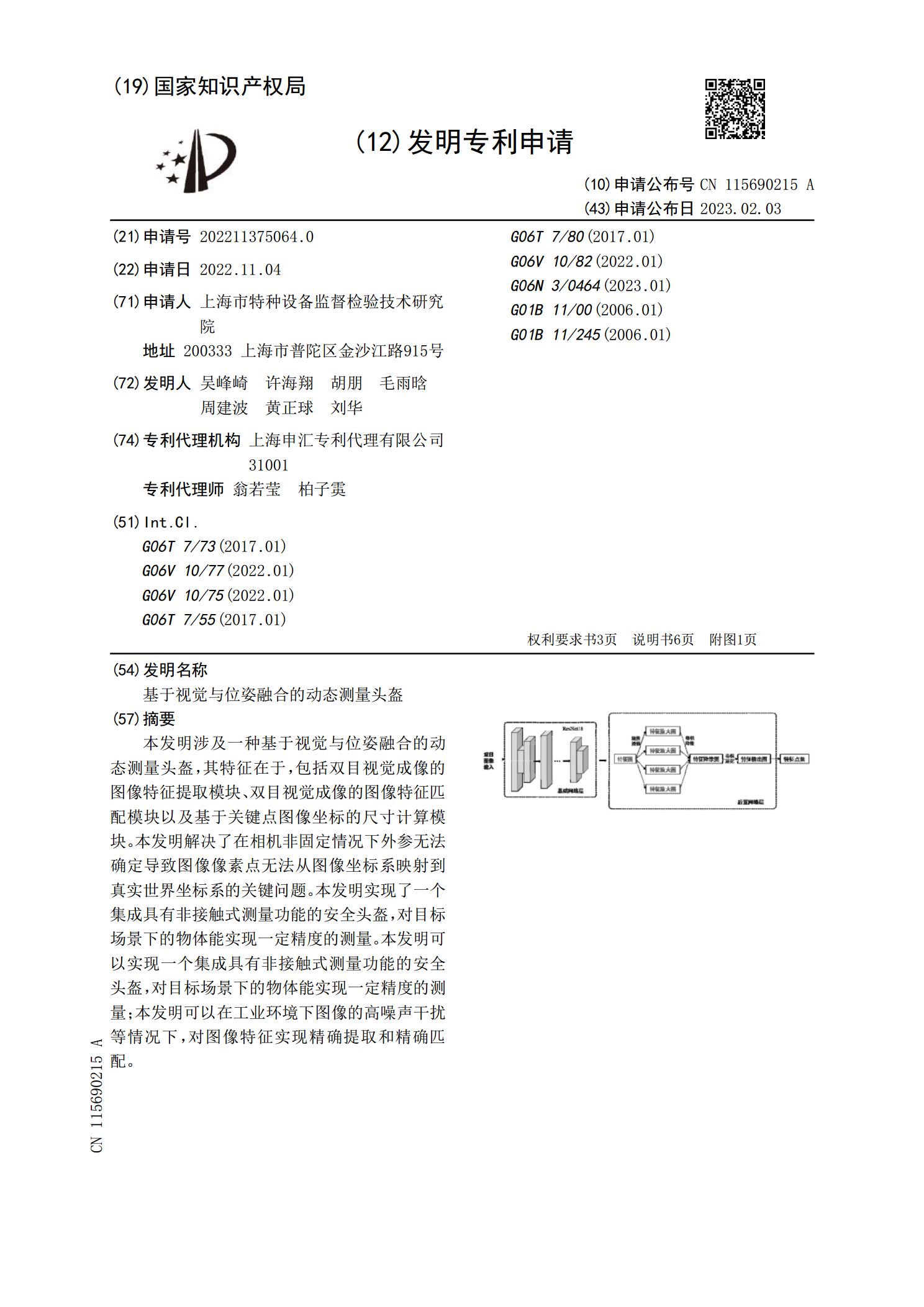
本发明涉及一种基于视觉与位姿融合的动态测量头盔,其特征在于,包括双目视觉成像的图像特征提取模块、双目视觉成像的图像特征匹配模块以及基于关键点图像坐标的尺寸计算模块。本发明解决了在相机非固定情况下外参无法确定导致图像像素点无法从图像坐标系映射到真实世界坐标系的关键问题。本发明实现了一个集成具有非接触式测量功能的安全头盔,对目标场景下的物体能实现一定精度的测量。本发明可以实现一个集成具有非接触式测量功能的安全头盔,对目标场景下的物体能实现一定精度的测量;本发明可以在工业环境下图像的高噪声干扰等情况下,对图像特

基于双目视觉极线补偿的圆孔位姿检测方法.pptx
添加副标题目录PART01PART02极线几何基础双目视觉极线补偿原理极线补偿在圆孔检测中的重要性PART03图像预处理特征提取位姿计算精度评估PART04实验设置与数据集实验结果展示结果分析与其他方法的比较PART05方法优势局限性分析改进方向PART06在工业检测中的应用前景在其他领域的应用可能性未来研究方向感谢您的观看