
汽车长下坡速度控制研究的任务书.docx

骑着****猪猪


1/4

2/4

3/4

4/4
在线预览结束,喜欢就下载吧,查找使用更方便
相关资料

汽车长下坡速度控制研究的任务书.docx
汽车长下坡速度控制研究的任务书一、研究背景随着社会的发展,汽车已经成为人们生活中不可缺少的一部分。然而,在汽车行驶过程中,高速公路、山路等长下坡路段的过度加速和控制是一个重要的安全问题。在长下坡路段,汽车需要保持稳定的速度和行驶安全。如果不能有效地控制速度,很可能出现制动失灵等危险情况,对驾驶员和其他道路使用者的交通安全构成威胁。因此,对汽车长下坡速度控制的研究与应用已经成为当前交通领域的重要课题。长下坡速度控制技术的研究对于汽车行驶的安全性、经济性和环保性等方面都具有重要的意义。本研究将聚焦于汽车长下坡

重载货车长大下坡行驶持续制动特性研究.docx
重载货车长大下坡行驶持续制动特性研究标题:重载货车长大下坡行驶持续制动特性研究摘要:随着城市化和经济的快速发展,货车在物流行业中发挥着至关重要的作用。然而,在重载状态下,货车在长大下坡行驶中会面临制动问题。为了提高货车行驶的安全性和可靠性,本研究以重载货车长大下坡行驶持续制动特性为研究对象,分析制动系统的工作原理及其对货车性能的影响,探讨制动系统的优化方案。第一章:引言1.1研究背景1.2研究目的1.3研究意义第二章:重载货车行驶特性与制动系统分析2.1重载货车行驶特性分析2.2货车制动系统的工作原理2.

商用货车长下坡制动器温度监测与预警系统研究的任务书.docx
商用货车长下坡制动器温度监测与预警系统研究的任务书任务书一、任务背景随着物流行业的快速发展,商用货车的使用率越来越高,而货车在运行过程中,经常要行驶在陡峭的山区道路上,下坡时需要大量使用刹车,随着行驶时间的增长和施加的制动力,货车的制动器温度也会不断升高。如果不及时对制动器温度进行监测和处理,将会影响到整车的安全性和使用寿命,给货车行驶带来极大的隐患。因此,本研究旨在设计一种商用货车长下坡制动器温度监测与预警系统,有效预防制动器温度过高的情况发生,确保货车行驶的安全。二、研究内容1.研究商用货车长下坡制动
一种能控制下坡速度的手推车.pdf
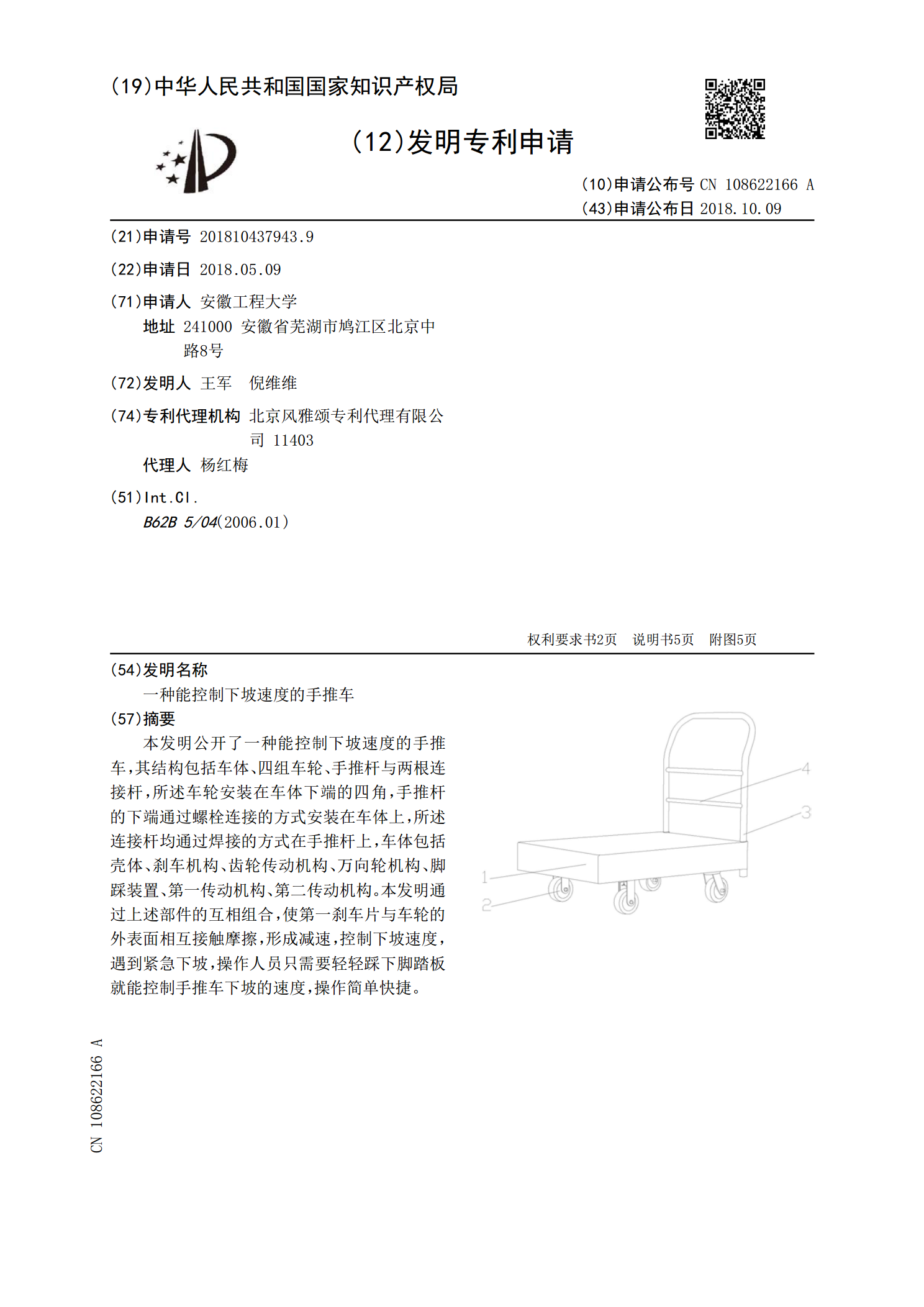
本发明公开了一种能控制下坡速度的手推车,其结构包括车体、四组车轮、手推杆与两根连接杆,所述车轮安装在车体下端的四角,手推杆的下端通过螺栓连接的方式安装在车体上,所述连接杆均通过焊接的方式在手推杆上,车体包括壳体、刹车机构、齿轮传动机构、万向轮机构、脚踩装置、第一传动机构、第二传动机构。本发明通过上述部件的互相组合,使第一刹车片与车轮的外表面相互接触摩擦,形成减速,控制下坡速度,遇到紧急下坡,操作人员只需要轻轻踩下脚踏板就能控制手推车下坡的速度,操作简单快捷。

基于动态规划的电动商用车长下坡联合制动控制策略.docx
基于动态规划的电动商用车长下坡联合制动控制策略Title:DynamicProgramming-basedCooperativeBrakingControlStrategyforLongDownhillElectricCommercialVehiclesAbstract:Electriccommercialvehiclesfaceuniquechallengeswhendescendinglongslopesduetotheabsenceofanenginebrakingsystem.Inthispape