
基于多传感器融合的复杂越野环境人员识别方法.pptx

快乐****蜜蜂


1/10

2/10

3/10

4/10
5/10

6/10
7/10

8/10

9/10

10/10
亲,该文档总共31页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料

基于多传感器融合的复杂越野环境人员识别方法.pptx
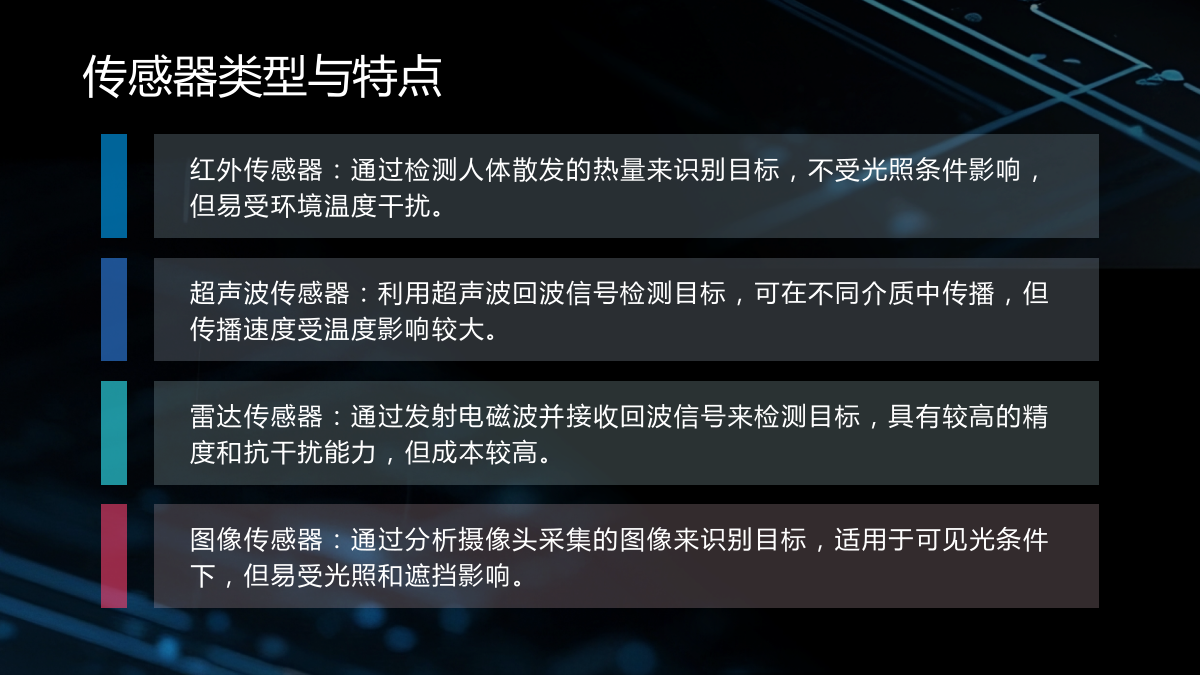
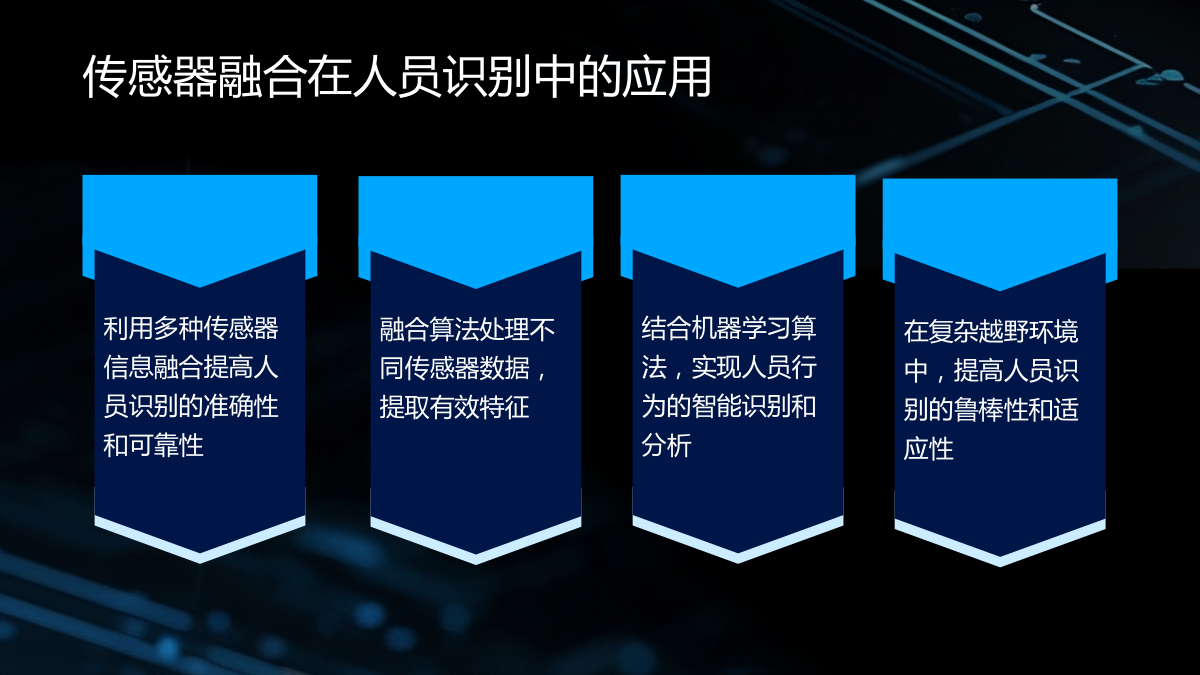
基于多传感器融合的复杂越野环境人员识别方法目录添加目录项标题多传感器融合技术传感器类型与特点传感器融合原理与技术传感器融合在人员识别中的应用优势与挑战复杂越野环境对人员识别的影响复杂越野环境的特点环境因素对人员识别的影响提高识别准确率的必要性应对策略与技术要求基于多传感器融合的人员识别方法数据采集与预处理特征提取与选择分类器设计算法优化与实现实验验证与结果分析应用场景与效果评估安全监控与应急救援军事侦察与智能巡逻无人驾驶与智能交通效果评估方法与指标实际应用案例与分析面临的挑战与发展前景技术瓶颈与难点跨学科

基于多传感器融合的轨道识别方法探究.pptx
添加副标题目录PART01PART02传感器技术简介传感器融合基本原理传感器融合在轨道识别中的应用PART03轨道图像采集轨道特征提取轨道数据预处理PART04特征级融合算法决策级融合算法融合算法性能评估PART05识别准确率分析识别效率分析算法优化与改进PART06面临的主要挑战未来发展方向技术应用前景感谢您的观看
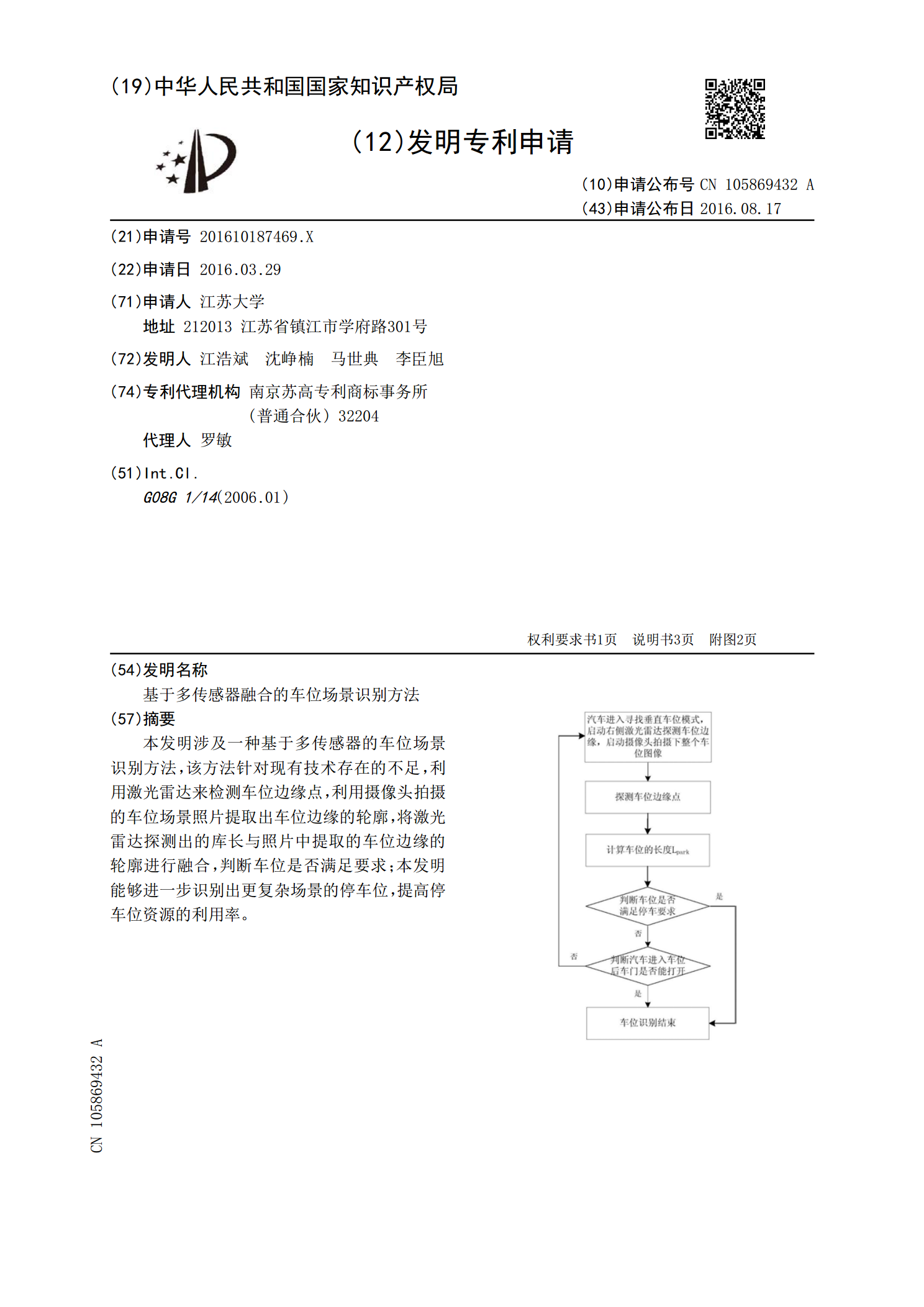
基于多传感器融合的车位场景识别方法.pdf
本发明涉及一种基于多传感器的车位场景识别方法,该方法针对现有技术存在的不足,利用激光雷达来检测车位边缘点,利用摄像头拍摄的车位场景照片提取出车位边缘的轮廓,将激光雷达探测出的库长与照片中提取的车位边缘的轮廓进行融合,判断车位是否满足要求;本发明能够进一步识别出更复杂场景的停车位,提高停车位资源的利用率。

面向越野环境的多传感器融合SLAM技术研究.docx
面向越野环境的多传感器融合SLAM技术研究面向越野环境的多传感器融合SLAM技术研究摘要:自主导航和环境建模是无人系统中的重要任务。然而,传统的SLAM技术在面对复杂的越野环境时往往效果不佳。为了解决这一问题,本论文提出了一种面向越野环境的多传感器融合SLAM技术。该技术结合了激光雷达、惯性测量单元(IMU)和相机传感器,并利用多传感器数据的互补性进行地图构建和自主导航。通过实验验证,本论文的方法在复杂的越野环境中取得了较好的SLAM性能。关键词:多传感器融合,越野环境,SLAM,激光雷达,IMU,相机传

基于多传感器信息融合的齿轮故障识别方法.docx
基于多传感器信息融合的齿轮故障识别方法摘要:齿轮作为传动系统的核心元件,其故障往往会导致设备的停机,给生产和生活造成不便。因此,齿轮故障的识别和预测具有重要的意义。本文基于多传感器信息融合的方法,探讨了一种可靠的齿轮故障识别方法。该方法通过利用多传感器收集到的齿轮振动、声音和温度等信息,结合各种特征提取和分类算法,建立了一个系统的齿轮故障检测系统。实验结果表明,该方法具有较高的准确性和稳定性,在实际应用中具有广泛的应用前景。关键词:多传感器信息融合;齿轮故障识别;特征提取;分类算法。1.研究背景随着工业技