
基于深度强化学习的协同式自适应巡航控制.pptx

快乐****蜜蜂


1/10

2/10
3/10
4/10
5/10
6/10
7/10
8/10

9/10
10/10
亲,该文档总共27页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料

基于深度强化学习的协同式自适应巡航控制.pptx
基于深度强化学习的协同式自适应巡航控制目录添加章节标题深度强化学习在协同式自适应巡航控制中的应用深度强化学习的原理和优势协同式自适应巡航控制系统的概述深度强化学习在协同式自适应巡航控制中的实现方式基于深度强化学习的协同式自适应巡航控制系统设计系统架构和模块设计强化学习环境的构建深度强化学习算法的选择和优化训练和测试过程协同式自适应巡航控制的关键技术问题多智能体协同控制问题车辆动力学建模与控制问题传感器数据处理与融合问题安全性和稳定性问题基于深度强化学习的协同式自适应巡航控制的实验验证实验环境和测试平台实验

基于深度强化学习的协同式自适应巡航控制.docx
基于深度强化学习的协同式自适应巡航控制标题:基于深度强化学习的协同式自适应巡航控制摘要:自适应巡航控制是航空领域中的一个重要研究领域。传统的巡航控制方法通常基于预先定义的规则和模型,而无法在不同环境下自适应地应对各种情况。近年来,深度强化学习(DRL)技术的快速发展为解决这一问题提供了新的思路。本文提出了一种基于深度强化学习的协同式自适应巡航控制方法,通过使用递归神经网络实现对环境状态的建模,同时利用强化学习算法优化控制策略。实验结果表明,该方法可以自适应地调整巡航控制策略,并在各种环境中取得良好的性能。

基于DMPC的智能汽车协同式自适应巡航控制.pptx
基于DMPC的智能汽车协同式自适应巡航控制目录添加章节标题DMPC算法介绍DMPC算法的基本原理DMPC算法在智能汽车协同式自适应巡航控制中的应用DMPC算法的优势与局限性协同式自适应巡航系统的结构与功能协同式自适应巡航系统的基本构成协同式自适应巡航系统的功能特点协同式自适应巡航系统与其他巡航系统的比较基于DMPC的协同式自适应巡航控制策略基于DMPC的协同式自适应巡航控制策略的设计思路控制策略的实现过程与关键技术控制策略的实验验证与性能评估实际应用与案例分析基于DMPC的协同式自适应巡航控制在智能汽车中
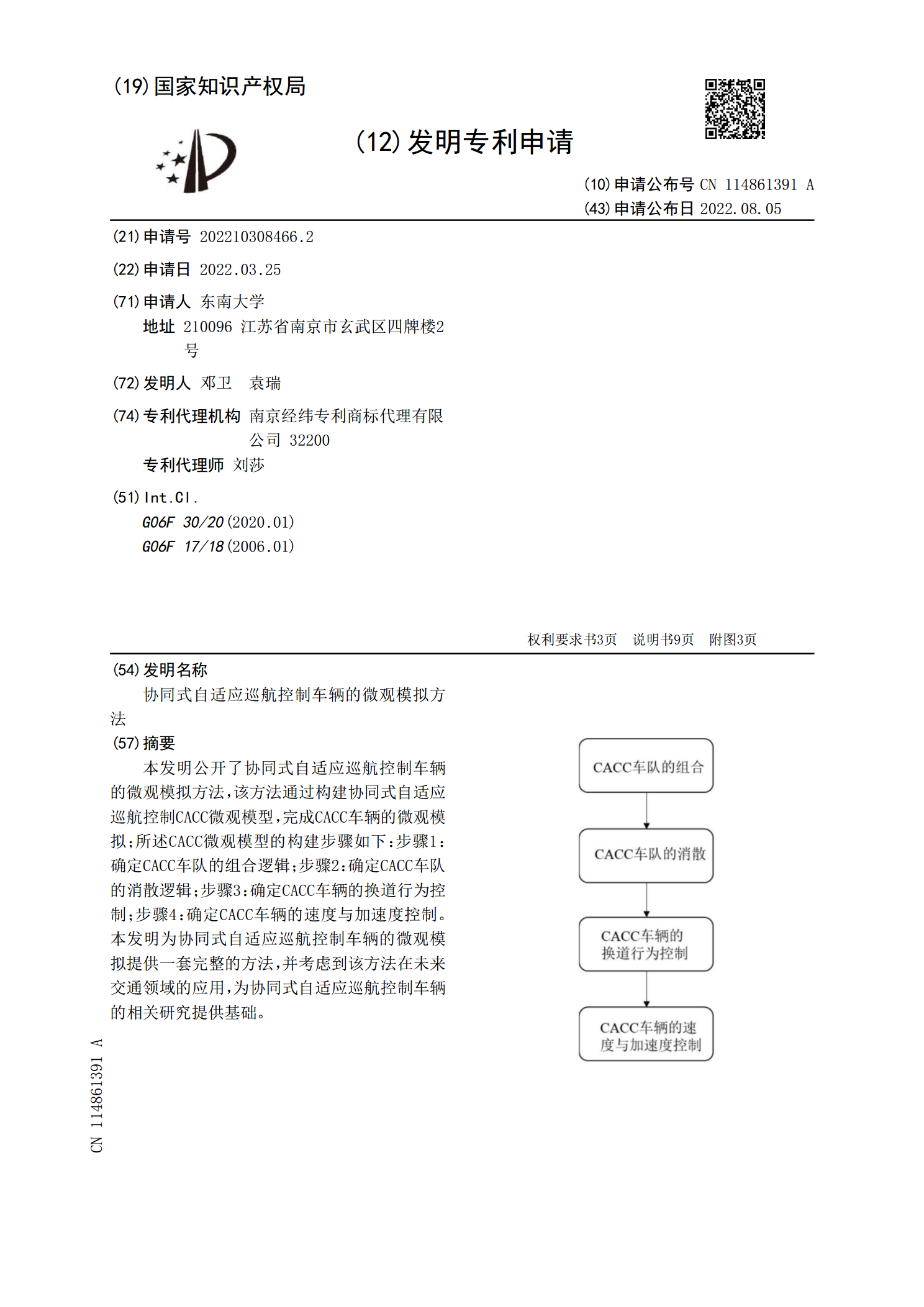
协同式自适应巡航控制车辆的微观模拟方法.pdf
本发明公开了协同式自适应巡航控制车辆的微观模拟方法,该方法通过构建协同式自适应巡航控制CACC微观模型,完成CACC车辆的微观模拟;所述CACC微观模型的构建步骤如下:步骤1:确定CACC车队的组合逻辑;步骤2:确定CACC车队的消散逻辑;步骤3:确定CACC车辆的换道行为控制;步骤4:确定CACC车辆的速度与加速度控制。本发明为协同式自适应巡航控制车辆的微观模拟提供一套完整的方法,并考虑到该方法在未来交通领域的应用,为协同式自适应巡航控制车辆的相关研究提供基础。

基于改进MPC的协同自适应巡航控制策略研究.pptx
汇报人:目录PARTONEPARTTWO介绍自适应巡航控制技术的研究现状和发展趋势阐述协同自适应巡航控制在智能交通系统中的重要性和应用前景PARTTHREE介绍MPC算法的基本原理和优点概述协同自适应巡航控制算法的实现过程和关键技术PARTFOUR介绍改进MPC算法的原理和实现方法分析改进MPC算法在协同自适应巡航控制中的性能表现和优势PARTFIVE介绍仿真实验的场景和参数设置分析仿真实验的结果,包括改进MPC算法在协同自适应巡航控制中的性能表现、鲁棒性和稳定性等方面的表现与传统算法进行对比,评估改进M