
基于双目视觉的采摘机器人.pptx

快乐****蜜蜂


1/10

2/10

3/10

4/10

5/10

6/10
7/10

8/10
9/10

10/10
亲,该文档总共24页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料

基于双目视觉的采摘机器人.pptx
基于双目视觉的采摘机器人01添加章节标题双目视觉技术定义和原理在采摘机器人中的应用技术优势和挑战采摘机器人结构与功能机器人的机械结构机器人的控制系统机器人的主要功能双目视觉与采摘机器人的结合双目视觉对采摘定位的作用双目视觉对采摘测量的作用双目视觉对采摘导航的作用实验与验证实验环境与设备实验过程与结果结果分析与讨论未来展望与研究方向双目视觉技术的进一步研究采摘机器人性能的提升方向双目视觉采摘机器人在实际应用中的前景感谢观看

基于双目立体视觉的采摘机器人设计.docx
基于双目立体视觉的采摘机器人设计双目立体视觉在现代机器人领域中越来越得到广泛的应用。传统的采摘农作物一般都是手工完成,劳动力成本高,效率低,同时也容易出现质量问题。因此,本文提出了一种基于双目立体视觉的采摘机器人设计方案。本文将从采摘机器人的研发背景、技术原理、系统架构、算法流程以及设备设计等方面进行深入探讨。一、研发背景随着经济的快速发展,人口不断增加,粮食需求也在不断扩大。而传统的农业采摘模式已经不能满足当前社会的需求,迫切需要一种高效、精准、智能的采摘系统。双目立体视觉技术正是满足这种需求的理想选择
基于双目视觉检测的黄花菜采摘机器人.pdf
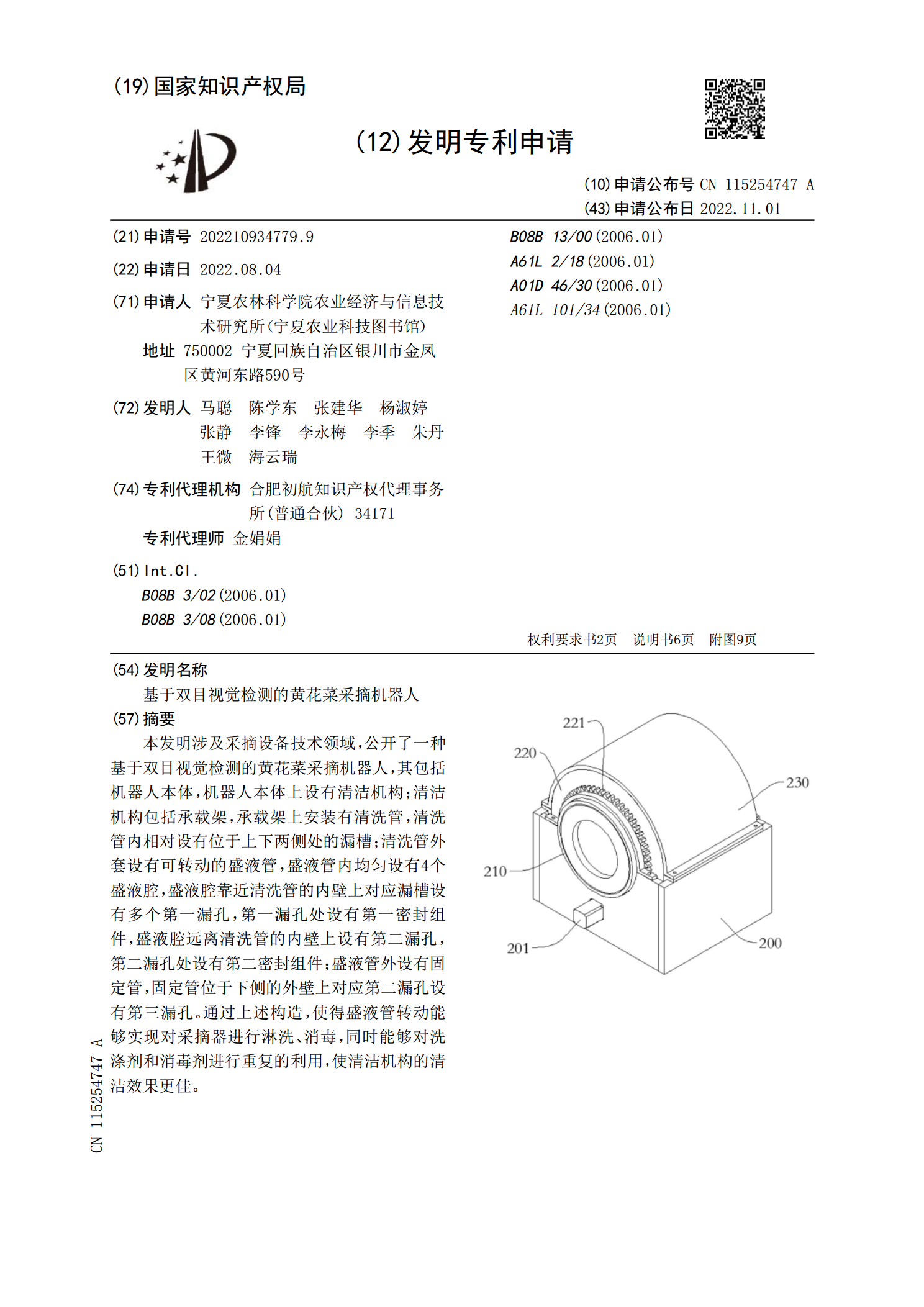
本发明涉及采摘设备技术领域,公开了一种基于双目视觉检测的黄花菜采摘机器人,其包括机器人本体,机器人本体上设有清洁机构;清洁机构包括承载架,承载架上安装有清洗管,清洗管内相对设有位于上下两侧处的漏槽;清洗管外套设有可转动的盛液管,盛液管内均匀设有4个盛液腔,盛液腔靠近清洗管的内壁上对应漏槽设有多个第一漏孔,第一漏孔处设有第一密封组件,盛液腔远离清洗管的内壁上设有第二漏孔,第二漏孔处设有第二密封组件;盛液管外设有固定管,固定管位于下侧的外壁上对应第二漏孔设有第三漏孔。通过上述构造,使得盛液管转动能够实现对采摘
一种基于双目视觉的菠萝采摘机器人.pdf
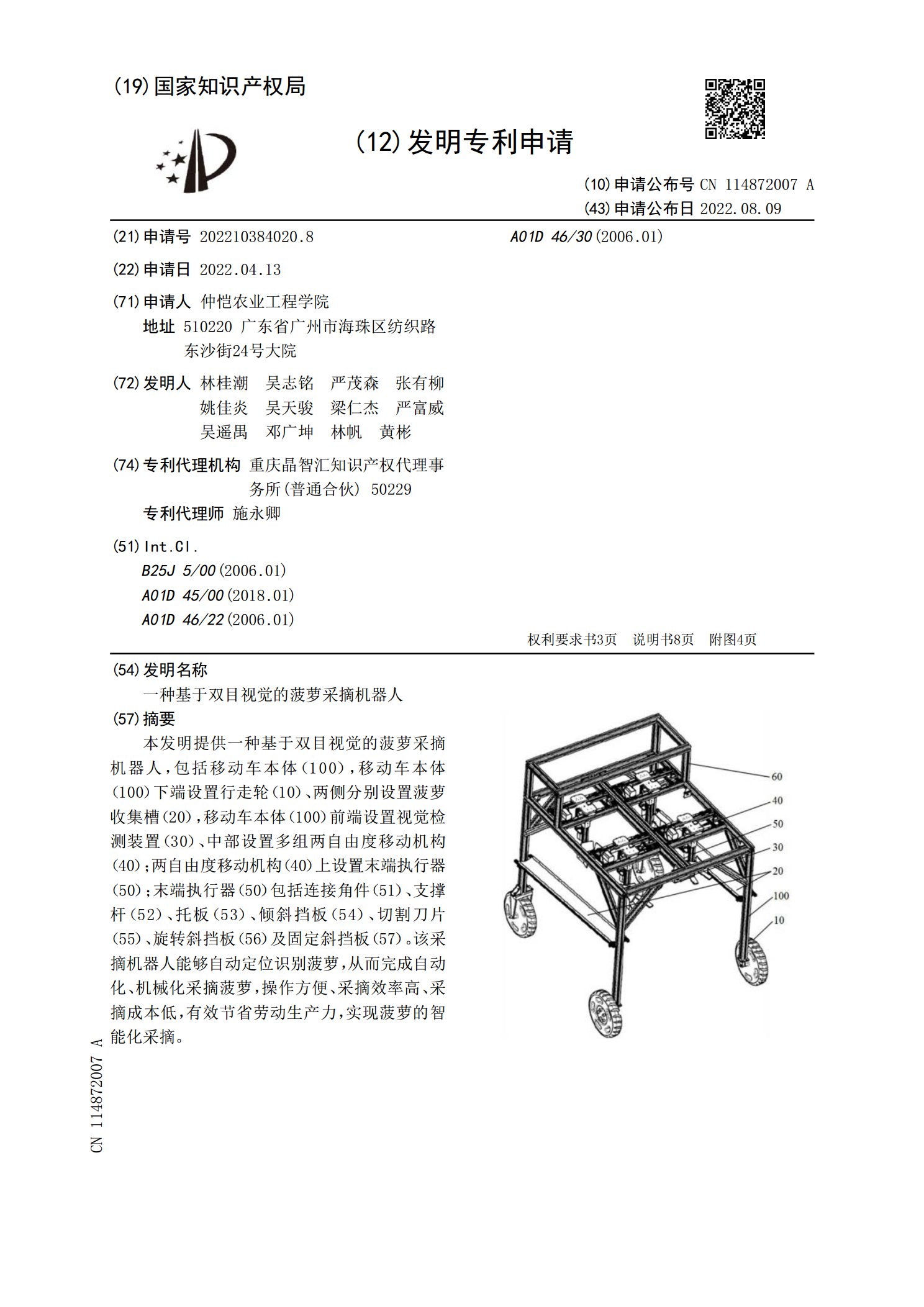
本发明提供一种基于双目视觉的菠萝采摘机器人,包括移动车本体(100),移动车本体(100)下端设置行走轮(10)、两侧分别设置菠萝收集槽(20),移动车本体(100)前端设置视觉检测装置(30)、中部设置多组两自由度移动机构(40);两自由度移动机构(40)上设置末端执行器(50);末端执行器(50)包括连接角件(51)、支撑杆(52)、托板(53)、倾斜挡板(54)、切割刀片(55)、旋转斜挡板(56)及固定斜挡板(57)。该采摘机器人能够自动定位识别菠萝,从而完成自动化、机械化采摘菠萝,操作方便、采摘

基于双目立体视觉技术的果蔬采摘机器人视觉系统的研究.docx
基于双目立体视觉技术的果蔬采摘机器人视觉系统的研究摘要:本文主要介绍了基于双目立体视觉技术的果蔬采摘机器人视觉系统的研究。首先,介绍了果蔬采摘机器人行业的现状和发展趋势,并分析了机器人采摘的优势和挑战。然后,介绍了双目立体视觉技术在机器人视觉系统中的应用,包括双目摄像机的组成原理、视差计算和三维重构方法等。接着,介绍了果蔬采摘机器人视觉系统的整体结构和实现方法,并详细讨论了双目立体视觉技术在视觉系统中的应用,包括果蔬位置检测、成熟度评估和快速拍摄等。最后,通过实验证明了果蔬采摘机器人视觉系统的可行性和有效