
基于自适应模糊控制的AGV轨迹跟踪系统.pptx

快乐****蜜蜂

1/10

2/10

3/10

4/10
5/10

6/10
7/10
8/10

9/10

10/10
亲,该文档总共27页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料

基于自适应模糊控制的AGV轨迹跟踪系统.pptx
,目录PartOnePartTwo模糊逻辑系统的基本概念自适应模糊控制算法的原理自适应模糊控制算法的实现过程自适应模糊控制算法的优势PartThreeAGV轨迹跟踪系统的基本概念AGV轨迹跟踪系统的组成AGV轨迹跟踪系统的功能AGV轨迹跟踪系统的应用场景PartFour系统总体设计模糊控制器设计轨迹跟踪算法设计系统实现流程PartFive仿真环境搭建仿真实验结果分析实验验证结果分析系统性能评估PartSix研究结论研究不足与展望THANKS
基于AGV系统的轨迹跟踪控制方法.pdf
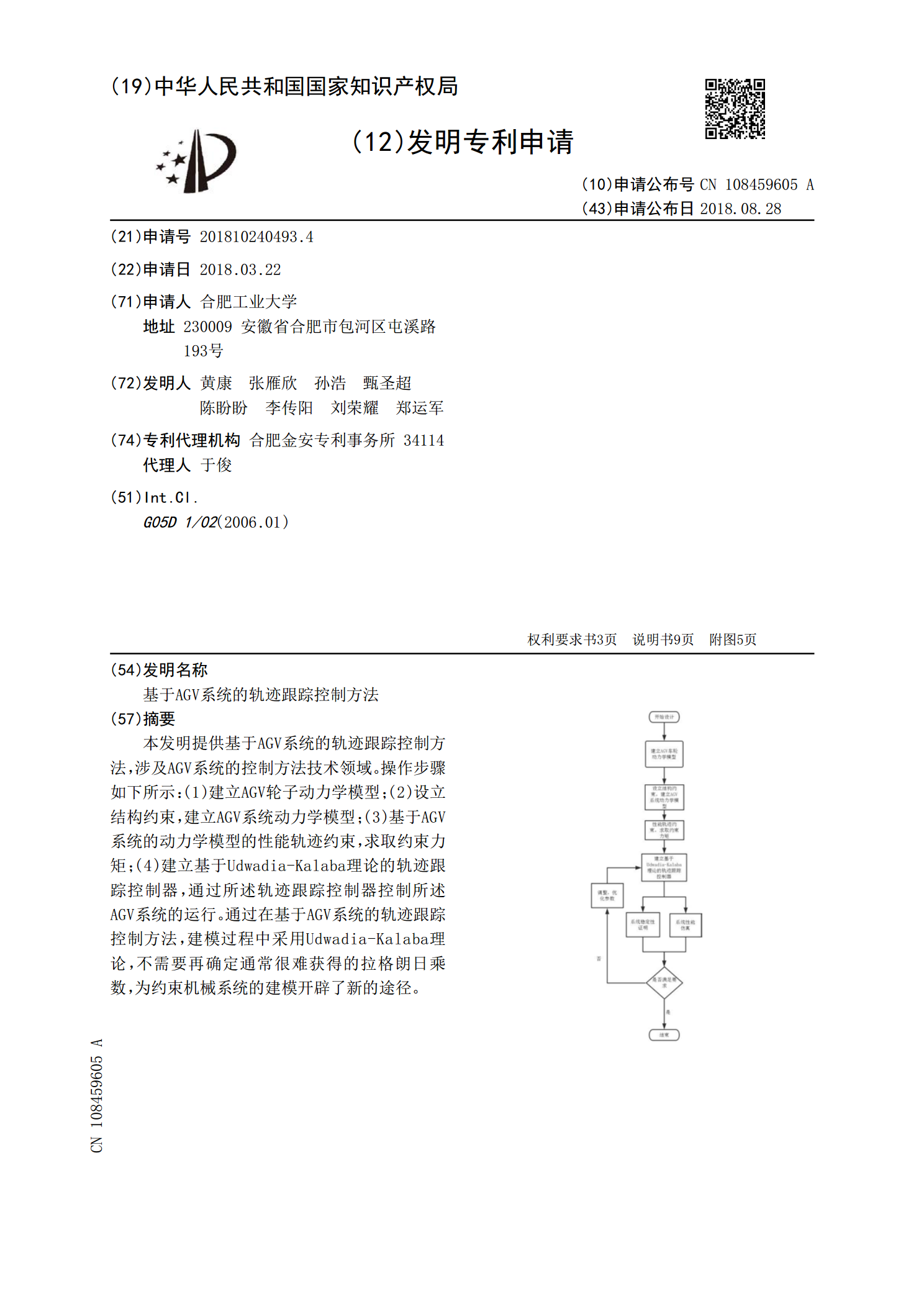
本发明提供基于AGV系统的轨迹跟踪控制方法,涉及AGV系统的控制方法技术领域。操作步骤如下所示:(1)建立AGV轮子动力学模型;(2)设立结构约束,建立AGV系统动力学模型;(3)基于AGV系统的动力学模型的性能轨迹约束,求取约束力矩;(4)建立基于Udwadia‑Kalaba理论的轨迹跟踪控制器,通过所述轨迹跟踪控制器控制所述AGV系统的运行。通过在基于AGV系统的轨迹跟踪控制方法,建模过程中采用Udwadia‑Kalaba理论,不需要再确定通常很难获得的拉格朗日乘数,为约束机械系统的建模开辟了新的途径

基于改进模糊PID的AGV轨迹跟踪研究.docx
基于改进模糊PID的AGV轨迹跟踪研究基于改进模糊PID的AGV轨迹跟踪研究摘要:AGV(自动导引车)作为一种重要的物流设备,在工业生产和物流管理中扮演着重要角色。AGV的轨迹跟踪问题是保证AGV运动精度和稳定性的核心问题之一。本文提出了一种基于改进模糊PID的AGV轨迹跟踪方法,通过对AGV系统动力学的建模和参数调节,实现了轨迹跟踪的稳定性和精确性。关键词:AGV,轨迹跟踪,模糊PID,稳定性,精确性1.引言随着自动化技术的不断发展,AGV作为一种自动导引车,广泛应用于工业生产和物流配送领域。AGV的核
AGV系统的轨迹跟踪控制方法.pdf
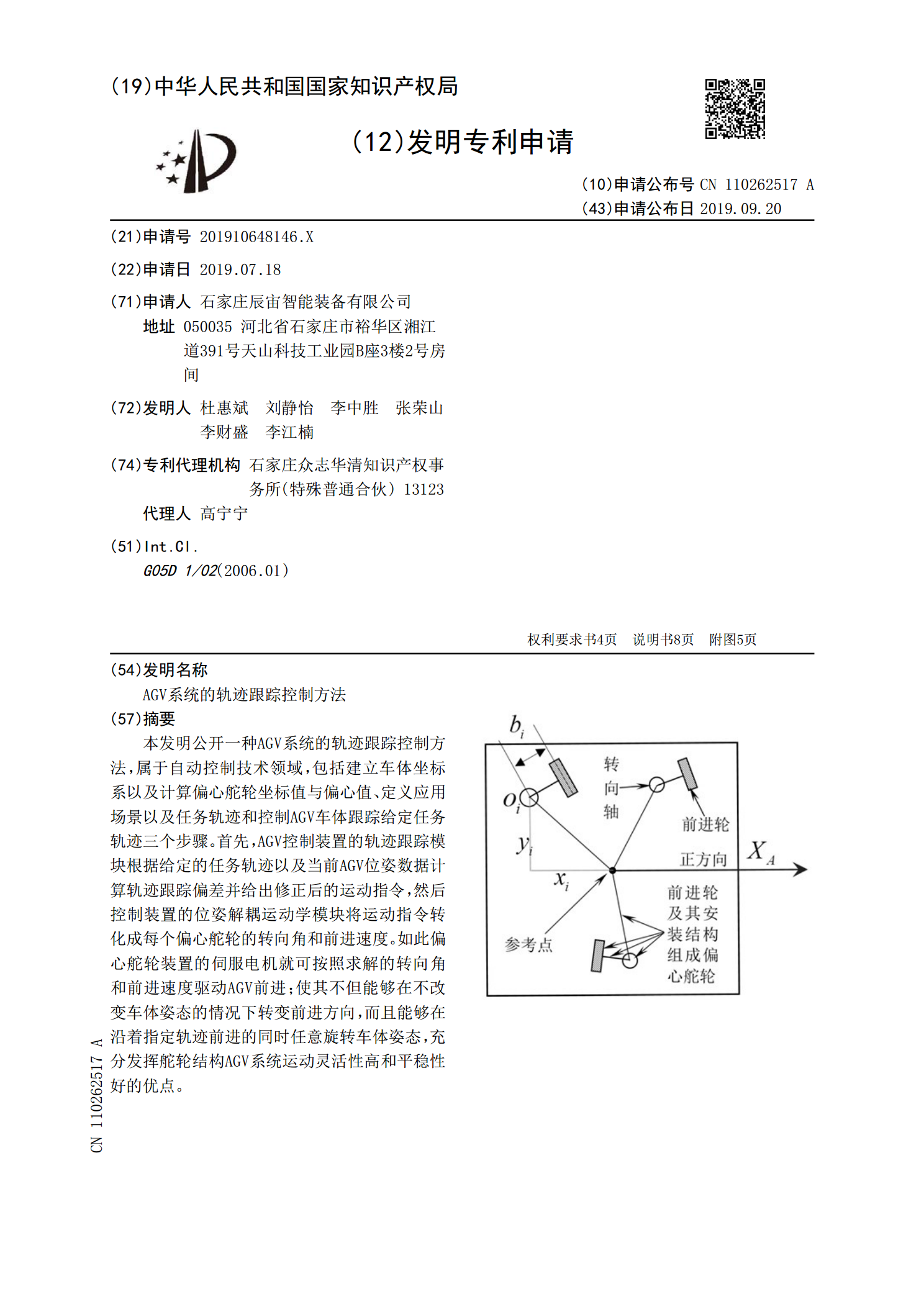
本发明公开一种AGV系统的轨迹跟踪控制方法,属于自动控制技术领域,包括建立车体坐标系以及计算偏心舵轮坐标值与偏心值、定义应用场景以及任务轨迹和控制AGV车体跟踪给定任务轨迹三个步骤。首先,AGV控制装置的轨迹跟踪模块根据给定的任务轨迹以及当前AGV位姿数据计算轨迹跟踪偏差并给出修正后的运动指令,然后控制装置的位姿解耦运动学模块将运动指令转化成每个偏心舵轮的转向角和前进速度。如此偏心舵轮装置的伺服电机就可按照求解的转向角和前进速度驱动AGV前进;使其不但能够在不改变车体姿态的情况下转变前进方向,而且能够在沿

基于模糊自适应滑模方法的AUV轨迹跟踪控制.docx
基于模糊自适应滑模方法的AUV轨迹跟踪控制基于模糊自适应滑模方法的AUV轨迹跟踪控制摘要:随着人类对海洋的深入研究和发展,自主水下航行器(AUV)被广泛应用于海洋勘探、水下环境监测等领域。AUV的轨迹跟踪控制在海洋作业中起着关键作用。本文提出一种基于模糊自适应滑模方法的AUV轨迹跟踪控制算法,利用模糊自适应滑模控制器实现AUV的跟踪轨迹的精确控制,并通过仿真实验证明了该方法的有效性。关键字:自主水下航行器(AUV),轨迹跟踪控制,模糊自适应滑模方法1.引言自主水下航行器(AUV)是一种能够在水下环境中自主