
基于迁移学习的机器人视觉识别与分拣策略.pptx

快乐****蜜蜂

1/10

2/10

3/10

4/10
5/10
6/10
7/10

8/10

9/10

10/10
亲,该文档总共30页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料

基于迁移学习的机器人视觉识别与分拣策略.pptx
基于迁移学习的机器人视觉识别与分拣策略目录添加章节标题迁移学习概述迁移学习的定义迁移学习的应用场景迁移学习的优势与挑战机器人视觉识别技术机器人视觉识别技术简介深度学习在机器人视觉识别中的应用图像识别算法的优化基于迁移学习的机器人视觉识别策略数据预处理与特征提取模型选择与训练模型优化与调参实时性处理与性能优化机器人分拣策略机器人分拣系统简介分拣算法的设计与实现机器人路径规划与任务调度分拣效率与准确率的提升方法实验结果与分析实验环境与数据集介绍实验结果展示结果分析与讨论对比实验与性能评估总结与展望基于迁移学习

基于视觉识别物料分拣机器人的设计.docx
基于视觉识别物料分拣机器人的设计基于视觉识别物料分拣机器人的设计摘要:随着工业自动化的不断发展,物料分拣作业日益成为现代工厂中的重要环节。传统的物料分拣方式存在效率低、准确率不高等问题。为了解决这些问题,本文设计了一种基于视觉识别的物料分拣机器人。通过采用图像处理和机器学习技术,该机器人能够准确识别不同类型的物料并进行分拣,实现了高效率和高准确率的物料分拣。实验结果表明,该机器人能够达到预期的分拣效果,具有较高的实用价值。关键词:物料分拣、视觉识别、图像处理、机器学习、分拣效率1.引言物料分拣是工业生产中
基于视觉的移动分拣机器人及其分拣方法.pdf
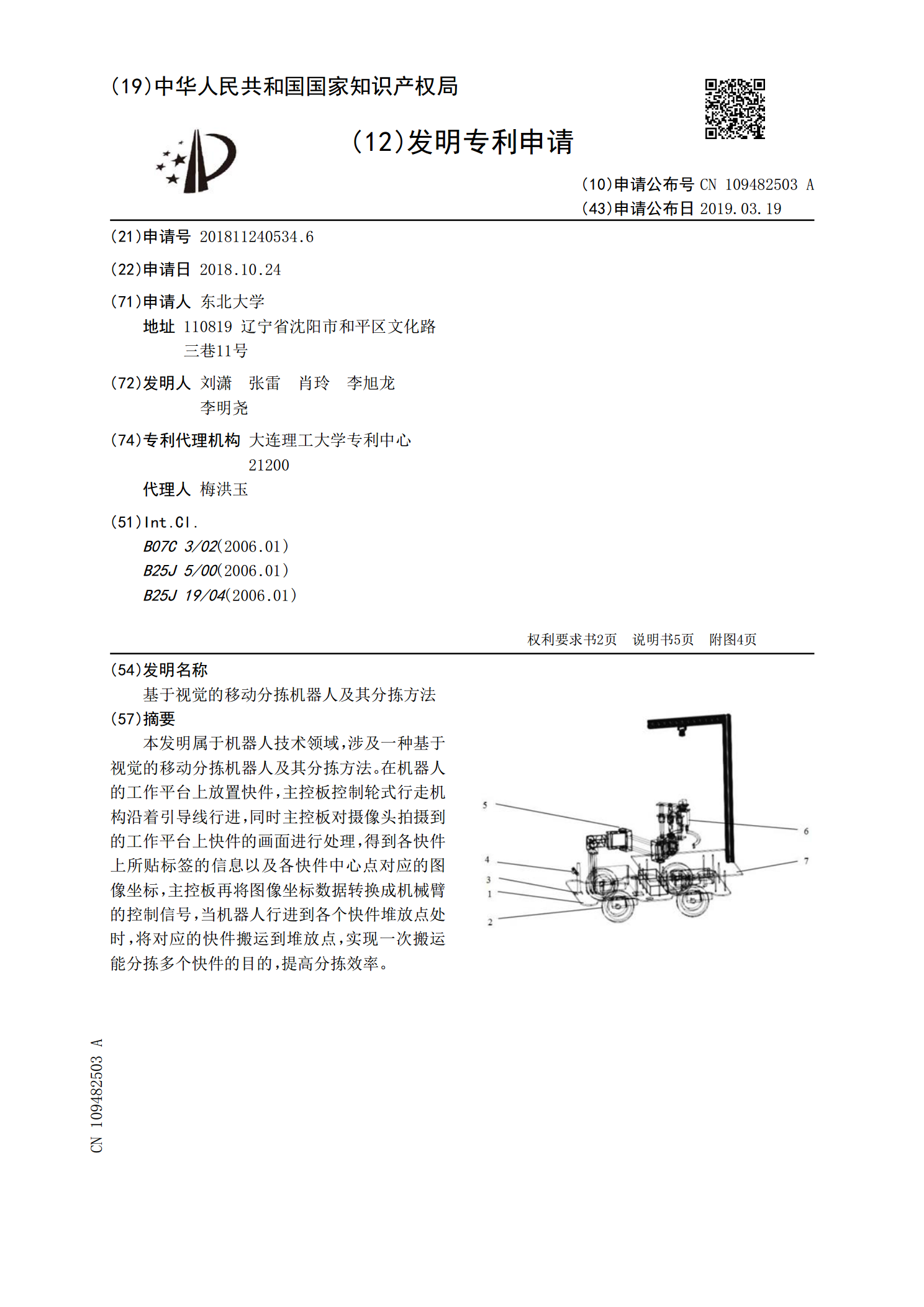
本发明属于机器人技术领域,涉及一种基于视觉的移动分拣机器人及其分拣方法。在机器人的工作平台上放置快件,主控板控制轮式行走机构沿着引导线行进,同时主控板对摄像头拍摄到的工作平台上快件的画面进行处理,得到各快件上所贴标签的信息以及各快件中心点对应的图像坐标,主控板再将图像坐标数据转换成机械臂的控制信号,当机器人行进到各个快件堆放点处时,将对应的快件搬运到堆放点,实现一次搬运能分拣多个快件的目的,提高分拣效率。

基于机器视觉的分拣机器人目标识别与定位的研究的中期报告.docx
基于机器视觉的分拣机器人目标识别与定位的研究的中期报告一、题目基于机器视觉的分拣机器人目标识别与定位的研究二、研究背景和意义随着自动化技术的发展,机器人在工业生产、物流分拣、家庭服务和医疗护理等领域得到了广泛的应用。分拣机器人作为自动化物流分拣领域的重要一员,目前已被广泛应用于快递、仓储、邮政等领域。然而,在实际应用中,分拣机器人需要面临大量物品混杂、不规则形状、不同大小和颜色等多种目标,如何进行快速、准确地目标识别和定位,是实现高效自动化分拣的关键之一。在这种背景下,本研究提出了基于机器视觉的分拣机器人
视觉识别机器人在分拣系统中的设计与应用.pptx
汇报人:/目录0102图像识别技术深度学习算法运动控制系统数据处理技术03物流行业分拣制造业物料分拣农业果实分拣其他领域应用04提高分拣效率降低人工成本精确度与稳定性技术成熟度与成本问题05技术创新与突破应用领域的拓展政策支持与产业发展市场竞争格局06国内外知名企业应用案例技术合作与创新实践解决方案的成功经验与教训客户反馈与市场反响07国际标准与规范国内标准与规范企业标准与规范制定标准化发展趋势汇报人: