
信标漂移情况下水下WSN节点三维定位方法.pdf

俊凤****bb


1/8

2/8

3/8

4/8

5/8

6/8

7/8

8/8
在线预览结束,喜欢就下载吧,查找使用更方便
相关资料
信标漂移情况下水下WSN节点三维定位方法.pdf
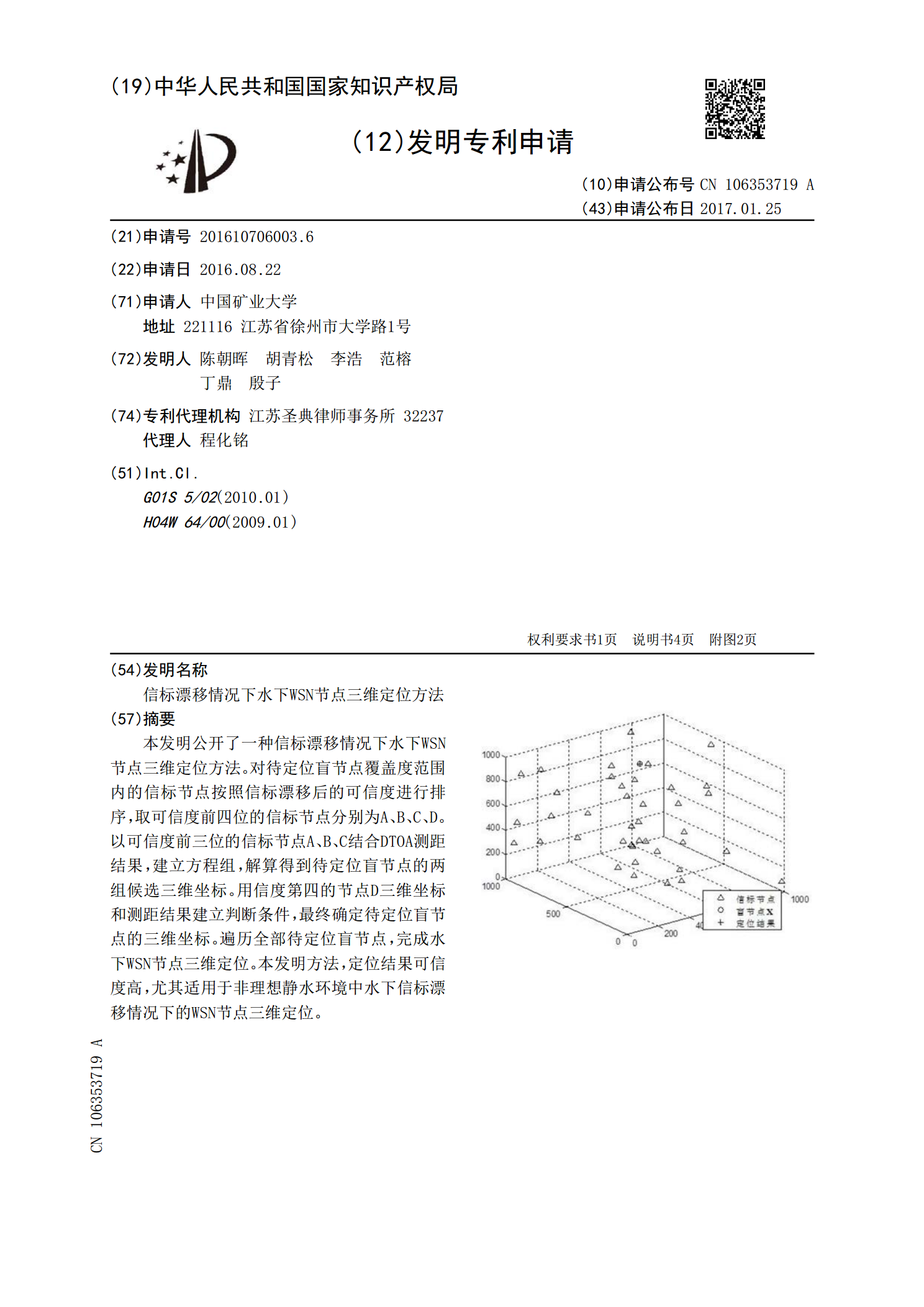
本发明公开了一种信标漂移情况下水下WSN节点三维定位方法。对待定位盲节点覆盖度范围内的信标节点按照信标漂移后的可信度进行排序,取可信度前四位的信标节点分别为A、B、C、D。以可信度前三位的信标节点A、B、C结合DTOA测距结果,建立方程组,解算得到待定位盲节点的两组候选三维坐标。用信度第四的节点D三维坐标和测距结果建立判断条件,最终确定待定位盲节点的三维坐标。遍历全部待定位盲节点,完成水下WSN节点三维定位。本发明方法,定位结果可信度高,尤其适用于非理想静水环境中水下信标漂移情况下的WSN节点三维定位。

基于信标节点RSSI自校正的WSN三维定位.docx
基于信标节点RSSI自校正的WSN三维定位一、研究背景随着物联网的发展,越来越多的场景需要对无线传感器网络(WSN)中的节点进行实时追踪和定位。WSN三维定位是其中一种重要的技术手段,可用于工厂、医院、学校等需要物联网环境的地方。但在实际应用中,由于节点定位误差大、成本高等问题,使得WSN三维定位技术的研究面临巨大的挑战。解决该问题,需要一个有效的方法,通过各种技术手段来探测环境中的节点数据,进而提供背景信息,进行节点定位。本文针对该问题,在已有的基础上,结合常见的信标节点RSSI技术,设计一种包含节点信

EKF在移动信标的WSN节点定位中的应用.docx
EKF在移动信标的WSN节点定位中的应用概述移动信标技术是运用在智能物联网中的一种定位技术,它是通过信号的强度和传播时间等多种方式利用节点和信标之间相互作用的关系来实现位置的定位,使设备在离线或无GPS信号时也能够准确地定位,为现代通讯和导航系统提供了一种有效的解决方案。本文将重点讨论EKF算法在移动信标的WSN节点定位中的应用。WSN节点定位WSN是指由无线网络组成的分布式传感器网络。WSN节点是分布的传感器,它们被部署在被测区域中,并利用无线通信互相通信。WSN节点定位是指确定这些节点在空间中的确切位

单基阵三维纯方位水下信标声学定位方法.pptx
单基阵三维纯方位水下信标声学定位方法01添加章节标题单基阵原理声学定位原理单基阵与多基阵的区别单基阵的优势定位精度与误差分析三维纯方位水下信标系统系统组成与工作原理信标接收器设计信号处理算法定位解算方法声学信号处理技术信号采集与传输信号去噪与增强信号特征提取信号分类与识别实验验证与分析实验设置与数据采集实验结果展示与分析性能评估与对比分析误差来源与改进措施应用前景与发展趋势在水下定位领域的应用前景在其他领域的应用可能性技术发展趋势与展望感谢观看

一种水下航行器的水下信标定位方法.pdf
本发明属于水下定位技术领域,特别涉及一种水下航行器的定位方法。水声信标周期性广播水声信号;水下航行器在未接收到水声信号时,通过自身配备的电子罗盘、深度计以及读取自身的螺旋桨转速信息进行航位推算,并在接收到所搭载的多普勒测速仪测得的的绝对速度观测后,构造海流速度观测量并通过Kalman滤波进行海流速度校正;水下航行器接收到水声信号后,考虑水下声速的未知性、水声信标位置误差及水声信号收发端的时钟漂移,以此基于扩展Kalman滤波算法及期望最大化算法,以水声信号传递时间为观测变量,进行水下航行器的位置更新。本发