
基于CANBUS的双焊炬管道全位置自动焊机控制系统的研究的任务书.docx

骑着****猪猪


1/3

2/3

3/3
在线预览结束,喜欢就下载吧,查找使用更方便
相关资料

基于CANBUS的双焊炬管道全位置自动焊机控制系统的研究的任务书.docx
基于CANBUS的双焊炬管道全位置自动焊机控制系统的研究的任务书任务书一、研究背景随着国民经济的发展,工业自动化和智能化程度也越来越高。传统的手动焊接已经不能满足工业的生产需求,全自动焊接技术已经成为了工业焊接的发展方向。目前,基于CANBUS的双焊炬管道全位置自动焊机控制系统已经在某些领域得到了应用。然而,在实际生产中,该系统仍存在一些问题和缺陷,需要进行深入的研究和优化。二、研究目的和意义本研究旨在通过对自动化控制技术的研究,建立基于CANBUS的双焊炬管道全位置自动焊机控制系统的理论模型,并对系统进

长输管道双焊炬全位置自动焊设备及工艺研究.docx
长输管道双焊炬全位置自动焊设备及工艺研究随着经济的发展,能源需求日益增长,长输管道已经成为供应能源的重要渠道之一。长输管道的质量和安全至关重要,而双焊炬全位置自动焊设备及工艺则成为保证管道质量和安全的重要手段。一、双焊炬全位置自动焊设备的概念及特点双焊炬全位置自动焊设备是一种针对长输管道进行焊接的设备,利用双焊炬同时进行内、外焊接,实现全位置焊接。该设备具有以下特点:1.操作简单:该设备操作简单易学,使用方便。2.焊接效率高:通过双焊炬同时进行内、外焊接,加快了焊接速度和效率。3.焊接质量高:该设备使用多

长输管道双焊炬全位置自动焊设备及工艺研究的任务书.docx
长输管道双焊炬全位置自动焊设备及工艺研究的任务书任务书任务名称:长输管道双焊炬全位置自动焊设备及工艺研究任务来源:工程项目需求任务目标:基于当前长输管道建设工程的需要,开发适用于双焊炬全位置自动焊的设备,并针对该设备进行相关工艺研究,提高焊接质量和效率。任务内容:1.设备设计和开发基于双焊炬全位置自动焊需求,设计并开发适用于长输管道焊接的设备。该设备需具有以下特点:焊接精度高、操作简单、可靠性高、自动化程度高等特点。2.工艺研究和优化研究焊接过程中的热力学和气动学原理,并针对双焊炬全位置自动焊进行工艺研究

长输管道双焊炬全位置自动焊设备及工艺研究的开题报告.docx
长输管道双焊炬全位置自动焊设备及工艺研究的开题报告【题目】长输管道双焊炬全位置自动焊设备及工艺研究【指导教师】XXX【研究背景】随着我国经济的快速发展,石油、天然气等能源消费的不断增加,长输管道在石油、天然气等行业中扮演着至关重要的角色。而长输管道的质量问题也是一个备受关注的话题。现有的管线焊接设备存在着销焊、层错等问题,在使用效率、产品质量和经济效益等方面还存在一定的局限性。因此,发展一种全新的管道自动焊接设备和工艺将在实现管道焊接高效、高质量和节省成本方面发挥具有重要作用的价值。【研究内容】1、分析长
一种全位置管道焊机的双焊炬双驱升降机构.pdf
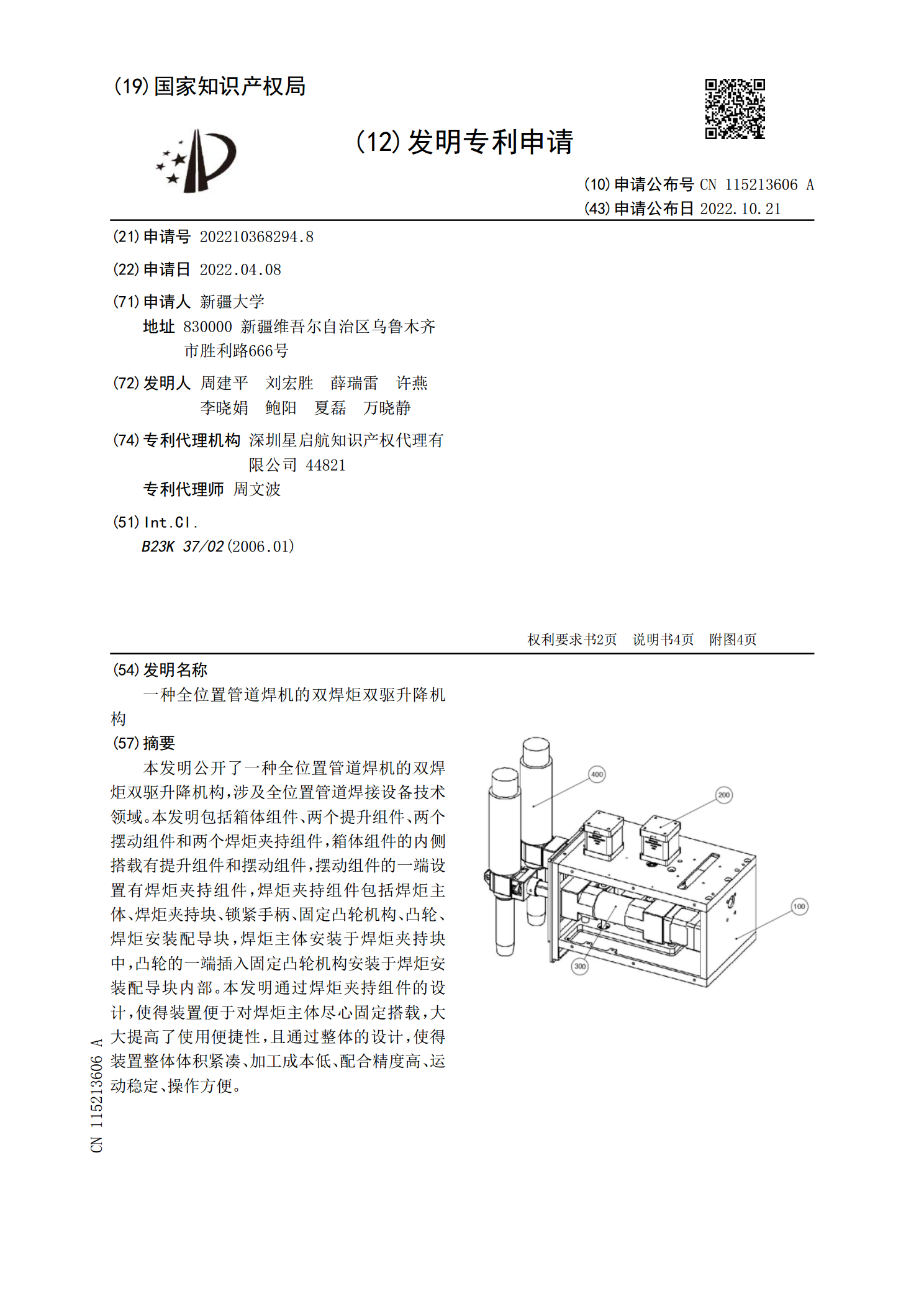
本发明公开了一种全位置管道焊机的双焊炬双驱升降机构,涉及全位置管道焊接设备技术领域。本发明包括箱体组件、两个提升组件、两个摆动组件和两个焊炬夹持组件,箱体组件的内侧搭载有提升组件和摆动组件,摆动组件的一端设置有焊炬夹持组件,焊炬夹持组件包括焊炬主体、焊炬夹持块、锁紧手柄、固定凸轮机构、凸轮、焊炬安装配导块,焊炬主体安装于焊炬夹持块中,凸轮的一端插入固定凸轮机构安装于焊炬安装配导块内部。本发明通过焊炬夹持组件的设计,使得装置便于对焊炬主体尽心固定搭载,大大提高了使用便捷性,且通过整体的设计,使得装置整体体积