
基于误差交叉耦合的多电磁铁悬浮系统滑模协同控制.pptx

快乐****蜜蜂

1/10

2/10

3/10

4/10
5/10

6/10

7/10

8/10

9/10

10/10
亲,该文档总共29页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料
基于误差交叉耦合的多电磁铁悬浮系统滑模协同控制.pptx
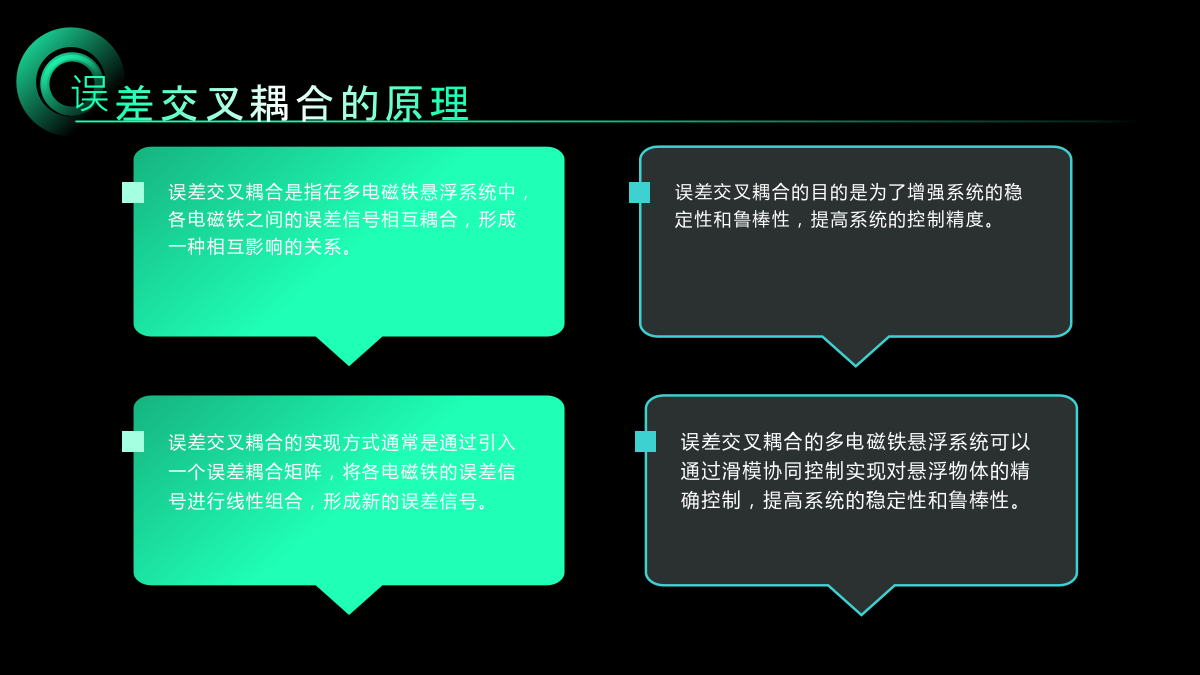
汇报人:CONTENTSPARTONEPARTTWO误差交叉耦合的原理多电磁铁悬浮系统的组成悬浮系统的控制目标悬浮系统的性能指标PARTTHREE滑模控制的原理协同控制的策略滑模协同控制的优势控制算法的实现PARTFOUR实验平台的搭建实验过程与数据采集结果分析的方法实验结果与性能评估PARTFIVE控制策略的局限性控制参数的优化控制算法的改进方向优化改进的预期效果PARTSIX在悬浮系统中的应用价值在其他领域的应用潜力技术发展的趋势与展望未来研究的方向与重点汇报人:
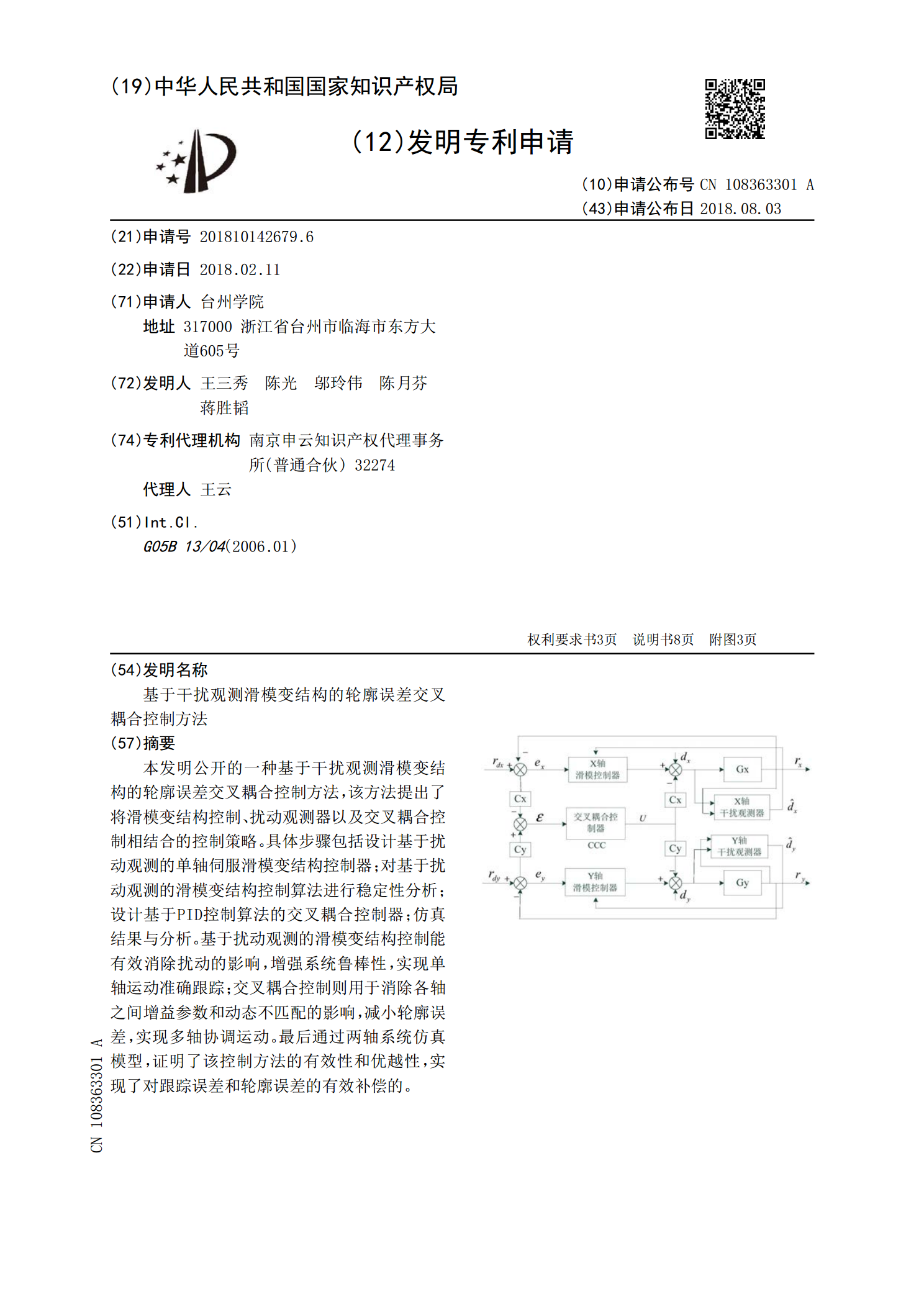
基于干扰观测滑模变结构的轮廓误差交叉耦合控制方法.pdf
本发明公开的一种基于干扰观测滑模变结构的轮廓误差交叉耦合控制方法,该方法提出了将滑模变结构控制、扰动观测器以及交叉耦合控制相结合的控制策略。具体步骤包括设计基于扰动观测的单轴伺服滑模变结构控制器;对基于扰动观测的滑模变结构控制算法进行稳定性分析;设计基于PID控制算法的交叉耦合控制器;仿真结果与分析。基于扰动观测的滑模变结构控制能有效消除扰动的影响,增强系统鲁棒性,实现单轴运动准确跟踪;交叉耦合控制则用于消除各轴之间增益参数和动态不匹配的影响,减小轮廓误差,实现多轴协调运动。最后通过两轴系统仿真模型,证明

单电磁铁悬浮系统的积分滑模控制研究的中期报告.docx
单电磁铁悬浮系统的积分滑模控制研究的中期报告中期报告:一、研究背景及意义电磁悬浮技术是一种在轨道上利用磁力物理原理,利用电磁力和重力悬浮物体或列车的高科技交通运输方式。电磁悬浮技术的发展已经展现出其无可比拟的巨大潜力,特别是在高速、超高速交通领域有着广泛的应用前景。单电磁铁悬浮系统作为电磁悬浮技术的一种形式,具有结构简单、运行可靠等特点,在一些小型磁浮系统中得到了广泛应用。但是,单电磁铁悬浮系统具有高度非线性、时变和不确定性等特征,控制策略的选择和参数设计对安全、稳定和运行效果的影响极大。因此,本研究旨在

单电磁铁悬浮系统的积分滑模控制研究的任务书.docx
单电磁铁悬浮系统的积分滑模控制研究的任务书任务书题目:单电磁铁悬浮系统的积分滑模控制研究任务背景及意义:电磁悬浮技术以其高速、高精度、无接触、低噪声、无磨损等优点,在高速列车、超高速列车、风力发电等领域有着重要的应用。在电磁悬浮系统中,电磁铁起到重要的作用,在实现悬浮和调节负载方面扮演着重要的角色。因此,对于电磁悬浮技术的研究和开发具有重要意义。本文旨在通过研究单电磁铁悬浮系统的积分滑模控制方法,提高其控制精度和响应速度,进一步推进电磁悬浮技术的研究和应用。研究目标:1.分析单电磁铁悬浮系统的结构和工作原

基于非线性积分滑模的交叉耦合控制研究.docx
基于非线性积分滑模的交叉耦合控制研究随着机器人技术的不断发展,交叉耦合控制成为了一种非常重要的控制策略。然而,在实际应用中,由于系统动态的非线性特性和被控对象之间的相互影响,交叉耦合控制的设计变得更加困难。因此,基于非线性积分滑模的交叉耦合控制成为了一种很有潜力的应对方式。本文将首先简要介绍交叉耦合控制的概念和特点,接着阐述非线性积分滑模控制方法的基本原理和滑模控制的优点,最后探讨基于非线性积分滑模的交叉耦合控制的实现方法以及其在多种系统中的应用。一、交叉耦合控制概述交叉耦合控制指的是一类控制方案,其主要