
基于PID算法和卡尔曼滤波的平衡车控制系统设计.pptx

快乐****蜜蜂

1/10
2/10
3/10
4/10
5/10
6/10
7/10
8/10
9/10
10/10
亲,该文档总共19页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料

基于PID算法和卡尔曼滤波的平衡车控制系统设计.pptx
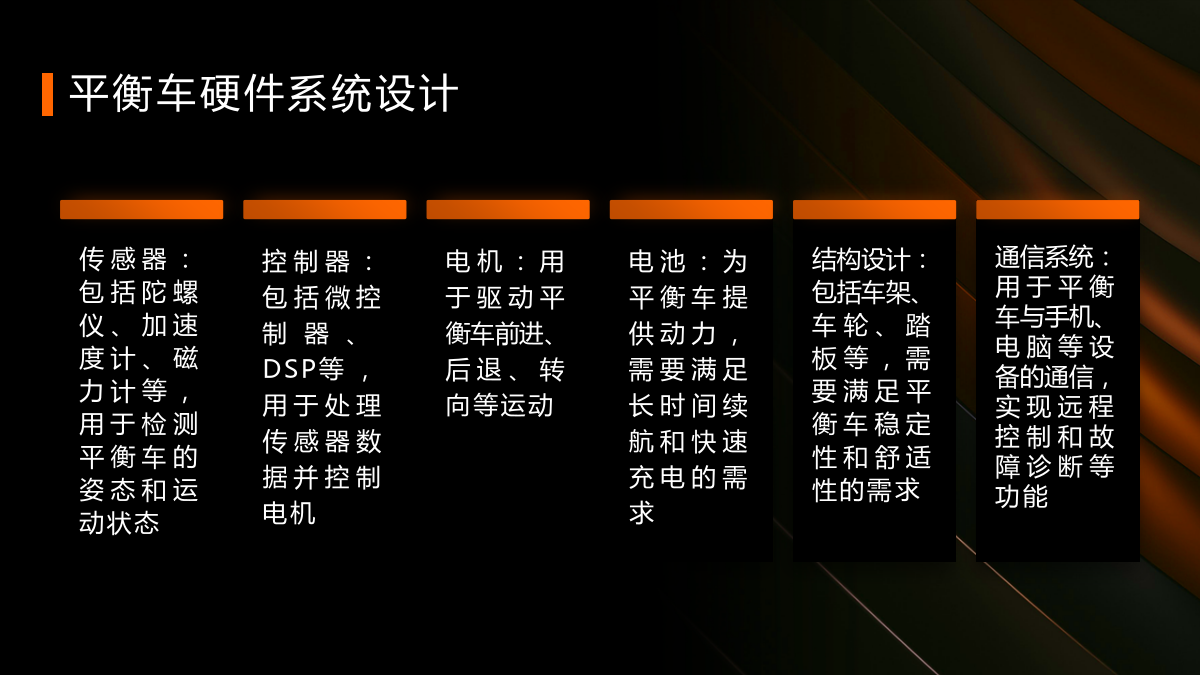
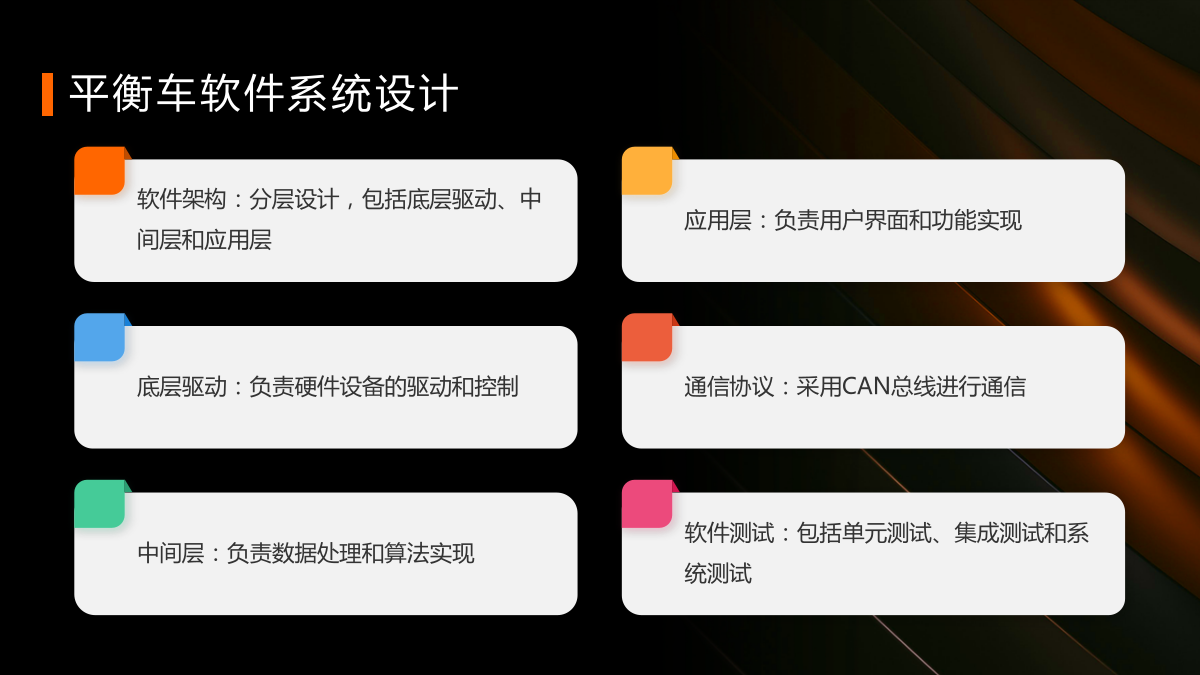
汇报人:/目录0102PID算法基本原理卡尔曼滤波基本原理PID算法和卡尔曼滤波在平衡车控制系统中的应用03平衡车硬件系统设计平衡车软件系统设计平衡车控制算法实现04实验环境与实验方法实验结果与分析结果与现有技术的比较05本文工作总结未来研究方向与展望汇报人:

基于卡尔曼滤波和双闭环PID控制的平衡车控制系统设计.docx
基于卡尔曼滤波和双闭环PID控制的平衡车控制系统设计摘要:本文提出了一种基于卡尔曼滤波和双闭环PID控制的平衡车控制系统设计,该系统通过使用传感器来监测平衡车的状态,并使用卡尔曼滤波算法来对传感器数据进行滤波和预测,从而提高了平衡车的稳定性和精度,同时通过双闭环PID控制算法来实现平衡车的位置和角度控制,得到了更好的控制效果。本文还通过实验验证了该系统的有效性。关键词:卡尔曼滤波、双闭环PID控制、平衡车、控制系统引言:平衡车(Segway)是一种基于倒立振子技术的个人运输工具,其主要由两个电动轮组成,可
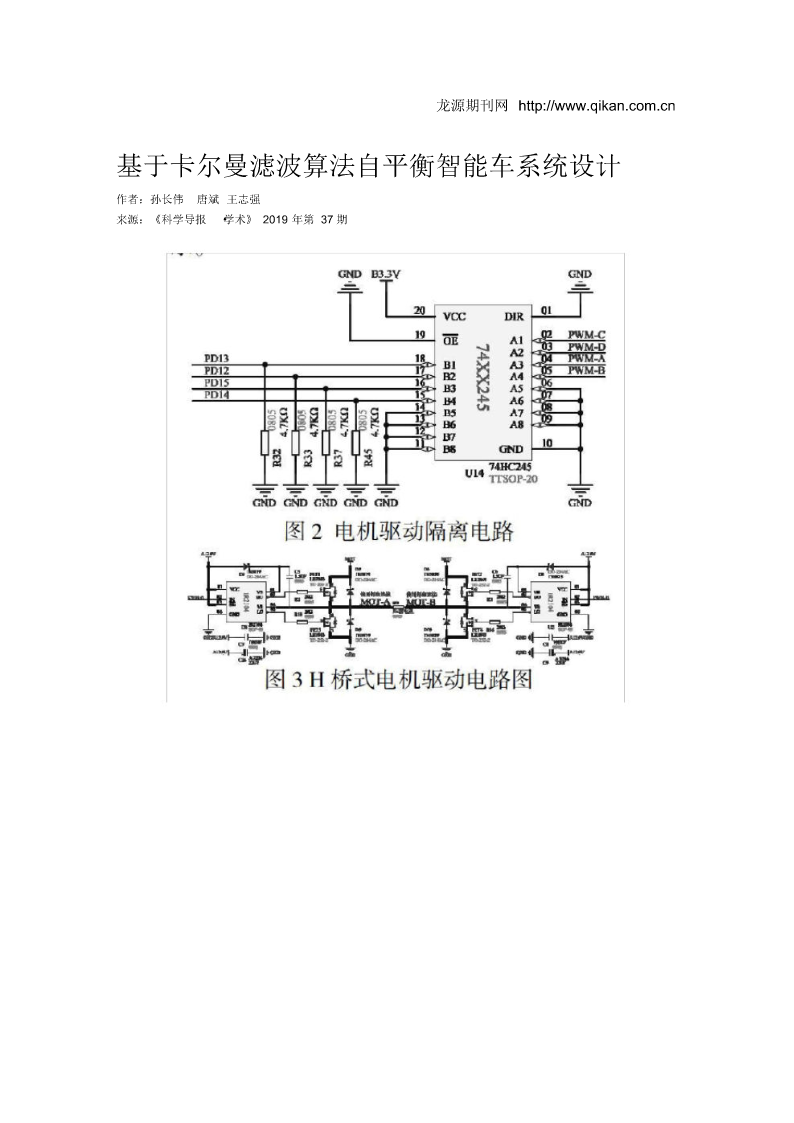
基于卡尔曼滤波算法自平衡智能车系统设计[最终版].pdf
基于卡尔曼滤波和PID控制两轮自平衡车[最终版].pdf
基于卡尔曼滤波和PID控制的两轮自平衡车[最终版].pdf