
基于模型预测控制无人驾驶车辆避障轨迹跟踪器设计.pptx

快乐****蜜蜂

1/10
2/10

3/10
4/10
5/10

6/10
7/10
8/10
9/10
10/10
亲,该文档总共27页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料
基于模型预测控制无人驾驶车辆避障轨迹跟踪器设计.pptx
汇报人:CONTENTSPARTONEPARTTWO模型预测控制算法原理模型预测控制算法在无人驾驶车辆中的应用模型预测控制算法的优势与挑战PARTTHREE避障轨迹跟踪器设计需求分析避障轨迹跟踪器硬件设计避障轨迹跟踪器软件设计避障轨迹跟踪器测试与验证PARTFOUR模型预测控制算法在避障轨迹跟踪器中的实现基于模型预测控制的避障轨迹跟踪器性能评估基于模型预测控制的避障轨迹跟踪器优化策略基于模型预测控制的避障轨迹跟踪器未来发展方向PARTFIVE实际应用案例介绍实际应用案例中遇到的问题与解决方案实际应用案例效

基于模型预测控制的无人车轨迹跟踪与避障控制.docx
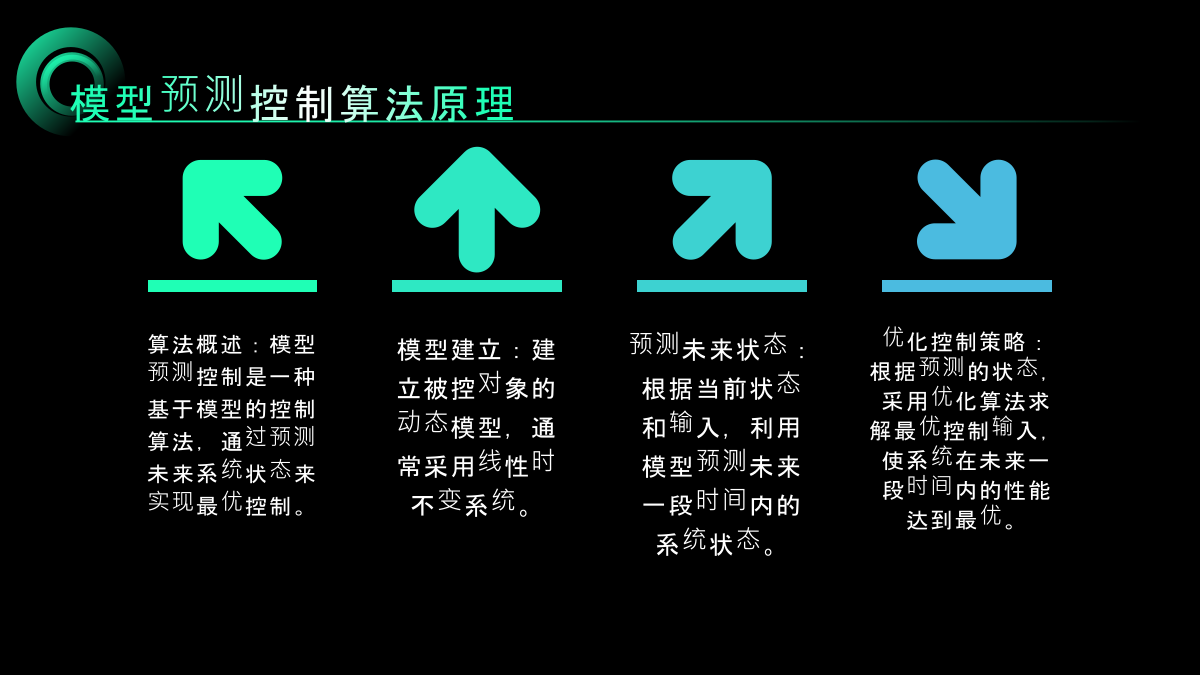
基于模型预测控制的无人车轨迹跟踪与避障控制基于模型预测控制的无人车轨迹跟踪与避障控制摘要:无人车作为自动驾驶技术的重要应用之一,其轨迹跟踪与避障控制是关键问题。本文提出了一种基于模型预测控制(MPC)的无人车轨迹跟踪与避障控制方法。首先,通过建立无人车运动模型,预测其在未来一段时间内的轨迹。然后,利用优化算法根据预测轨迹生成最优控制策略。最后,根据实时感知到的环境信息,调整控制策略以实现轨迹跟踪与避障。关键词:无人车,模型预测控制,轨迹跟踪,避障控制引言:随着自动驾驶技术的迅猛发展,无人车在各个领域的应用
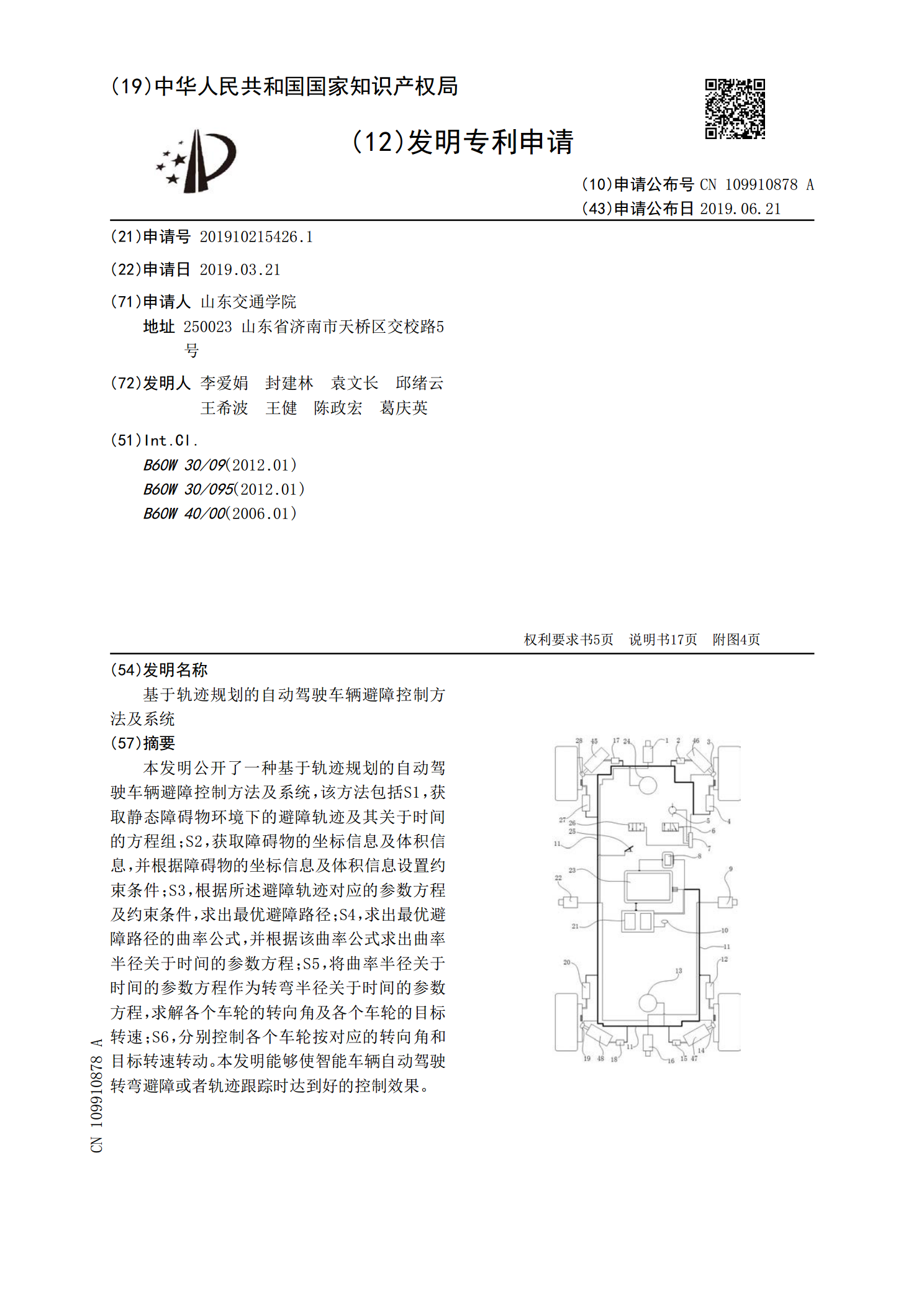
基于轨迹规划的自动驾驶车辆避障控制方法及系统.pdf
本发明公开了一种基于轨迹规划的自动驾驶车辆避障控制方法及系统,该方法包括S1,获取静态障碍物环境下的避障轨迹及其关于时间的方程组;S2,获取障碍物的坐标信息及体积信息,并根据障碍物的坐标信息及体积信息设置约束条件;S3,根据所述避障轨迹对应的参数方程及约束条件,求出最优避障路径;S4,求出最优避障路径的曲率公式,并根据该曲率公式求出曲率半径关于时间的参数方程;S5,将曲率半径关于时间的参数方程作为转弯半径关于时间的参数方程,求解各个车轮的转向角及各个车轮的目标转速;S6,分别控制各个车轮按对应的转向角和目
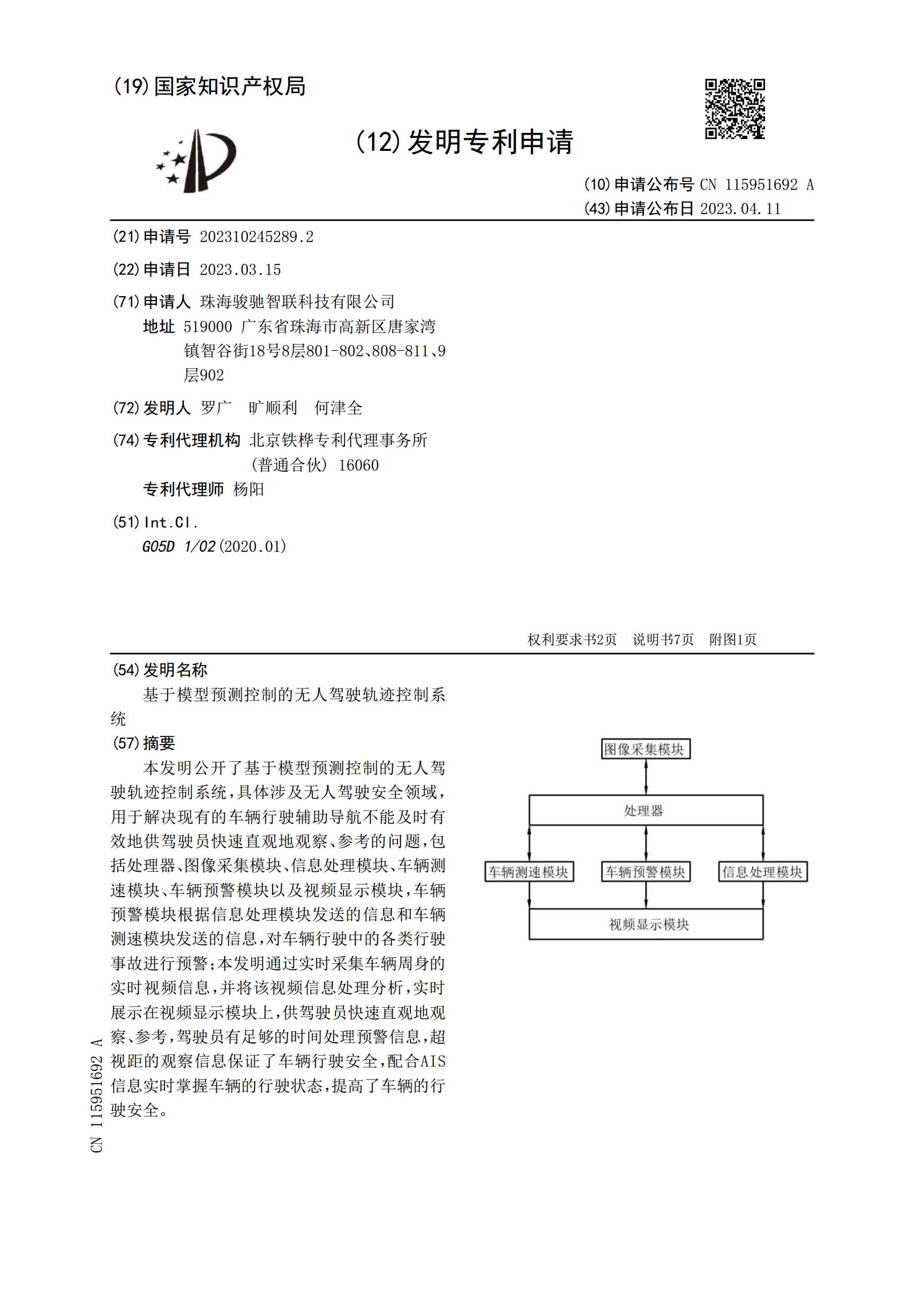
基于模型预测控制的无人驾驶轨迹控制系统.pdf
本发明公开了基于模型预测控制的无人驾驶轨迹控制系统,具体涉及无人驾驶安全领域,用于解决现有的车辆行驶辅助导航不能及时有效地供驾驶员快速直观地观察、参考的问题,包括处理器、图像采集模块、信息处理模块、车辆测速模块、车辆预警模块以及视频显示模块,车辆预警模块根据信息处理模块发送的信息和车辆测速模块发送的信息,对车辆行驶中的各类行驶事故进行预警;本发明通过实时采集车辆周身的实时视频信息,并将该视频信息处理分析,实时展示在视频显示模块上,供驾驶员快速直观地观察、参考,驾驶员有足够的时间处理预警信息,超视距的观察信

基于模型预测控制的汽车主动避障系统.docx
基于模型预测控制的汽车主动避障系统基于模型预测控制的汽车主动避障系统摘要:随着汽车行业的迅速发展,车辆安全问题日益凸显。为了减少交通事故的发生,越来越多的汽车制造商开始研发主动避障系统。本文提出了一种基于模型预测控制的汽车主动避障系统,该系统利用车辆的动力学模型来预测车辆的行为,并通过优化算法实时计算最优的避障策略。实验结果表明,所提出的系统能够显著提高汽车的避障性能,为汽车行驶安全提供了有力的保障。引言:随着世界经济的发展,汽车交通已经成为人们日常生活中不可或缺的一部分。然而,交通事故的发生频率仍然很高