
基于多视点的三维姿态运动重建与跟踪的任务书.docx

骑着****猪猪


1/3

2/3

3/3
在线预览结束,喜欢就下载吧,查找使用更方便
相关资料

基于多视点的三维姿态运动重建与跟踪的任务书.docx
基于多视点的三维姿态运动重建与跟踪的任务书任务书研究背景:人们在日常生活和工作中经常需要对三维物体进行姿态运动的分析和重建,例如机器人视觉、自动驾驶、运动捕捉以及虚拟现实等领域。而基于多视点的三维姿态运动重建与跟踪则可以通过多个相机同时观察同一物体并联合分析可视化结果,对物体进行精确的跟踪和分析,在人们的生活和工作中发挥着至关重要的作用。任务目标:本文旨在通过研究基于多视点的三维姿态运动重建与跟踪,实现对三维物体的姿态和运动的高精度测量和跟踪,并探索多视点的研究在机器人视觉、自动驾驶、运动捕捉以及虚拟现实

基于多视点的三维姿态运动重建与跟踪的中期报告.docx
基于多视点的三维姿态运动重建与跟踪的中期报告概述多视点的三维姿态运动重建与跟踪是计算机视觉领域中一个研究热点,涉及到多个子问题,如相机标定、姿态估计、运动跟踪等。本文基于已有的文献,介绍了该问题的相关背景、已有方法及其缺点、本项目的研究内容及初步成果。背景在计算机视觉领域中,多视点的三维姿态运动重建与跟踪涉及到利用多个摄像头对目标进行拍摄,并在后续过程中对其进行姿态估计、运动解算等计算,以得到目标的三维运动轨迹、姿态及变形等信息,可以应用于虚拟现实、运动分析等多个领域。已有方法与缺点该问题已有多种解决方法

基于多视点的三维重建技术研究的任务书.docx
基于多视点的三维重建技术研究的任务书一、研究背景随着计算机技术的不断发展和进步,三维重建技术在计算机视觉领域得到了广泛应用。传统的三维重建技术主要依赖于单个视角下的图像数据,因而不能真实地再现物体本身的三维特征。而多视点的三维重建技术则能够从不同的角度采集物体的图像和深度信息,通过将这些信息进行融合,能够更加准确地实现三维重建和建模。因此,在多媒体应用、虚拟现实、机器人视觉等方面得到了广泛的研究和应用。目前,多视点三维重建技术已经成为计算机视觉领域的一个热点问题,但是在实际应用过程中仍然存在一些挑战和难点
多视点相机下的实时三维人体体型与姿态重建方法及装置.pdf
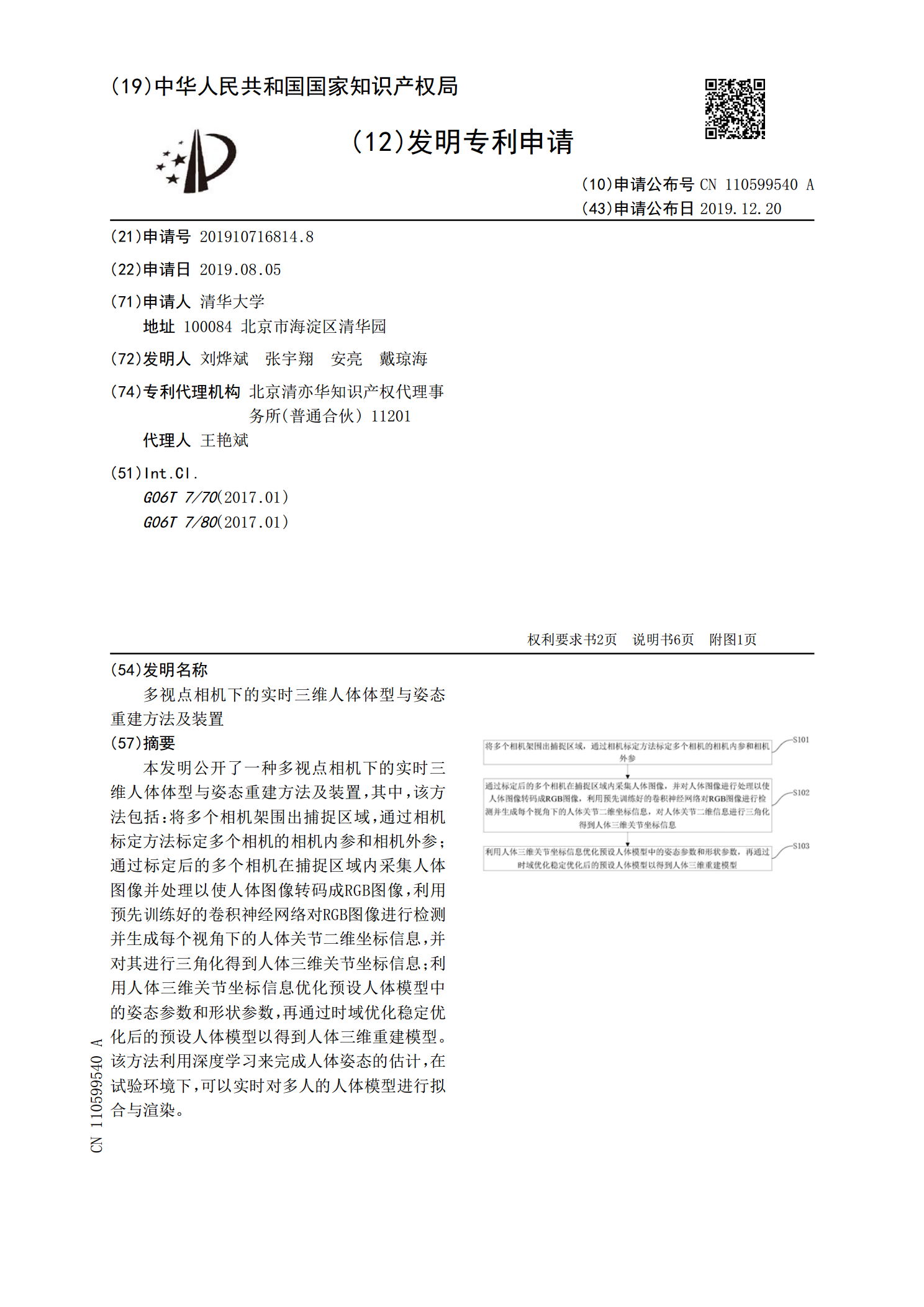
本发明公开了一种多视点相机下的实时三维人体体型与姿态重建方法及装置,其中,该方法包括:将多个相机架围出捕捉区域,通过相机标定方法标定多个相机的相机内参和相机外参;通过标定后的多个相机在捕捉区域内采集人体图像并处理以使人体图像转码成RGB图像,利用预先训练好的卷积神经网络对RGB图像进行检测并生成每个视角下的人体关节二维坐标信息,并对其进行三角化得到人体三维关节坐标信息;利用人体三维关节坐标信息优化预设人体模型中的姿态参数和形状参数,再通过时域优化稳定优化后的预设人体模型以得到人体三维重建模型。该方法利用深

基于视频的三维人体运动姿态跟踪的任务书.docx
基于视频的三维人体运动姿态跟踪的任务书一、任务概述三维人体运动姿态跟踪是指通过对人体运动视频的分析和处理,获取人体运动过程中的三维姿态参数,实现对人体运动过程的精确描述和准确分析。该技术广泛应用于动画、医疗、运动分析等领域,被广泛认为是计算机视觉和计算机图形学领域的重要研究方向之一。本任务主要是基于视频的三维人体运动姿态跟踪技术的研究和开发,包括以下几个方面的内容:1.设计并实现算法,实现对人体运动过程的三维姿态跟踪和重建。2.提取并分析视频中的运动信息,获取运动过程中的二维关键点数据,用于三维姿态跟踪。