
基于PDR的高精度室内融合定位方法研究的开题报告.docx

骑着****猪猪


1/3

2/3

3/3
在线预览结束,喜欢就下载吧,查找使用更方便
相关资料

基于PDR的高精度室内融合定位方法研究的开题报告.docx
基于PDR的高精度室内融合定位方法研究的开题报告一、选题背景室内定位技术一直是无线通信、物联网、智能制造等领域的重要领域之一。目前,主流的室内定位技术包括Wi-Fi定位、蓝牙定位、室内导航、惯性导航等,但这些方法都存在着一定的局限性,如信号容易受到干扰,定位精度受到限制等问题。针对以上问题,PDR(PedestrianDeadReckoning)作为一种惯性导航方法,逐渐成为室内定位技术的焦点。PDR利用加速度计、陀螺仪等惯性传感器实时检测用户的行走状态,通过重力加速度、转角速度等信息计算用户当前的位置,

基于PDR的高精度室内融合定位方法研究.docx
基于PDR的高精度室内融合定位方法研究基于PDR的高精度室内融合定位方法研究摘要:随着室内定位的需求日益增长,研究高精度的室内定位方法变得尤为重要。惯性测量单元(IMU)与步态检测技术的结合,即PDR(PedestrianDeadReckoning)技术,被广泛应用于室内定位中。然而,由于步行时的姿态变化和噪声导致的误差累积,PDR技术仍存在定位误差较大的问题。本文针对PDR技术中存在的问题展开研究,提出一种基于PDR的高精度室内融合定位方法,旨在提高室内定位的准确性和稳定性。1.引言室内定位是指在室内环

基于AHRS与PDR融合的个人室内自定位方法研究.docx
基于AHRS与PDR融合的个人室内自定位方法研究标题:基于AHRS与PDR融合的个人室内自定位方法研究摘要:个人室内自定位是以个人为中心,通过传感器数据进行室内定位的重要问题。本研究以姿态和运动数据为基础,通过融合AHRS(姿态和方向共享传感器)和PDR(步态导航)的方法,实现了更准确和稳定的个人室内自定位。在实验中,我们使用了IMU(惯性测量单元)传感器进行数据采集,通过AHRS算法和PDR算法对数据进行处理,提取出姿态和步态信息,并利用融合算法进行数据整合。实验结果表明,融合AHRS与PDR的定位方法

基于AHRS与PDR融合的个人室内自定位方法研究.docx
基于AHRS与PDR融合的个人室内自定位方法研究基于AHRS(姿态和姿势参考系统)与PDR(步行导航系统)融合的个人室内自定位方法研究摘要室内自定位是当前研究的热点之一,具有广泛的应用前景。本文提出了一种基于AHRS与PDR融合的个人室内自定位方法,利用AHRS传感器获取姿态和加速度信息,通过PDR算法对步长和方向进行估计,从而实现室内自定位。实验结果表明,该方法能够有效地提高室内自定位的精度和鲁棒性。1.引言室内自定位在室内导航、智能安防等领域具有重要的应用价值。目前,常用的室内自定位方法包括WiFi定
一种基于WiFi-PDR融合的高精度室内定位方法.pdf
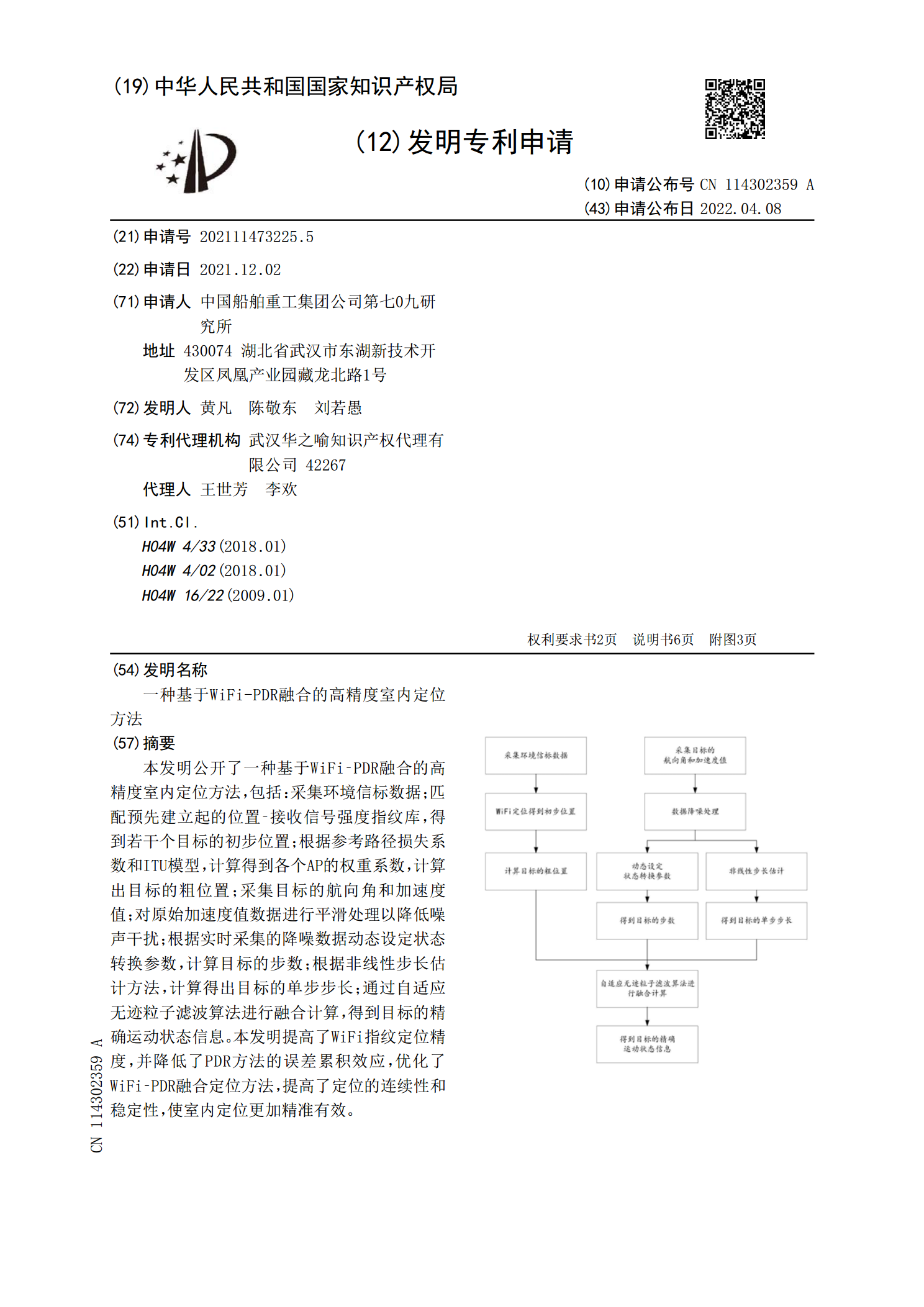
本发明公开了一种基于WiFi‑PDR融合的高精度室内定位方法,包括:采集环境信标数据;匹配预先建立起的位置‑接收信号强度指纹库,得到若干个目标的初步位置;根据参考路径损失系数和ITU模型,计算得到各个AP的权重系数,计算出目标的粗位置;采集目标的航向角和加速度值;对原始加速度值数据进行平滑处理以降低噪声干扰;根据实时采集的降噪数据动态设定状态转换参数,计算目标的步数;根据非线性步长估计方法,计算得出目标的单步步长;通过自适应无迹粒子滤波算法进行融合计算,得到目标的精确运动状态信息。本发明提高了WiFi指纹