
一种基于WiFi-PDR融合的高精度室内定位方法.pdf

东耀****哥哥


1/10
2/10
3/10
4/10
5/10
6/10

7/10
8/10
9/10

10/10
亲,该文档总共12页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料
基于WiFiPDR融合的室内定位方法.pptx
汇报人:CONTENTSWiFiPDR室内定位技术概述技术原理技术特点技术应用场景WiFi定位系统工作原理定位算法定位精度PDR定位系统工作原理步数检测与步长估计航位推算算法WiFiPDR融合定位方法融合方式算法流程定位精度提升实验与分析实验场景与设备实验过程实验结果与分析总结与展望技术总结技术优缺点分析技术发展趋势与展望汇报人:

基于WiFiPDR的室内定位初始位置融合解算方法研究.docx
基于WiFiPDR的室内定位初始位置融合解算方法研究标题:基于WiFiPDR的室内定位初始位置融合解算方法研究摘要:室内定位技术在许多领域中具有重要的应用价值,如智能导航、位置服务等。然而,由于室内环境的复杂性和GPS在室内无法正常工作的限制,室内定位精度和鲁棒性仍然是一个挑战。本论文主要研究了基于WiFi和PDR(PedestrianDeadReckoning)的室内定位初始位置融合解算方法,旨在提高定位精度和鲁棒性。1.引言室内定位技术已经成为了许多应用领域的核心技术之一。传统的室内定位技术主要依赖于

基于GSM/MEMS融合的高精度室内融合定位方法.pdf
本发明公开了一种基于GSM/MEMS融合的高精度室内融合定位方法,首先利用GSM无线信号的多径及非视距传播造成的位置指纹特性,采用搜索匹配进行位置指纹定位;然后根据惯性传感器件的输出数据解算出目标行人行走速度和航向角,获得用户的相对位置信息;最后利用抗差扩展卡尔曼滤波器将两者输出的位置结果进行融合。本发明通过引入抗差扩展卡尔曼滤波算法,将GSM环境下位置指纹定位结果与MEMS输出数据结合,使定位系统间优势互补,能够有效地克服MEMS器件定位存在的累积误差和GSM定位中存在的RSSI扰动对定位精度带来的影响
一种基于WiFi-PDR融合的高精度室内定位方法.pdf
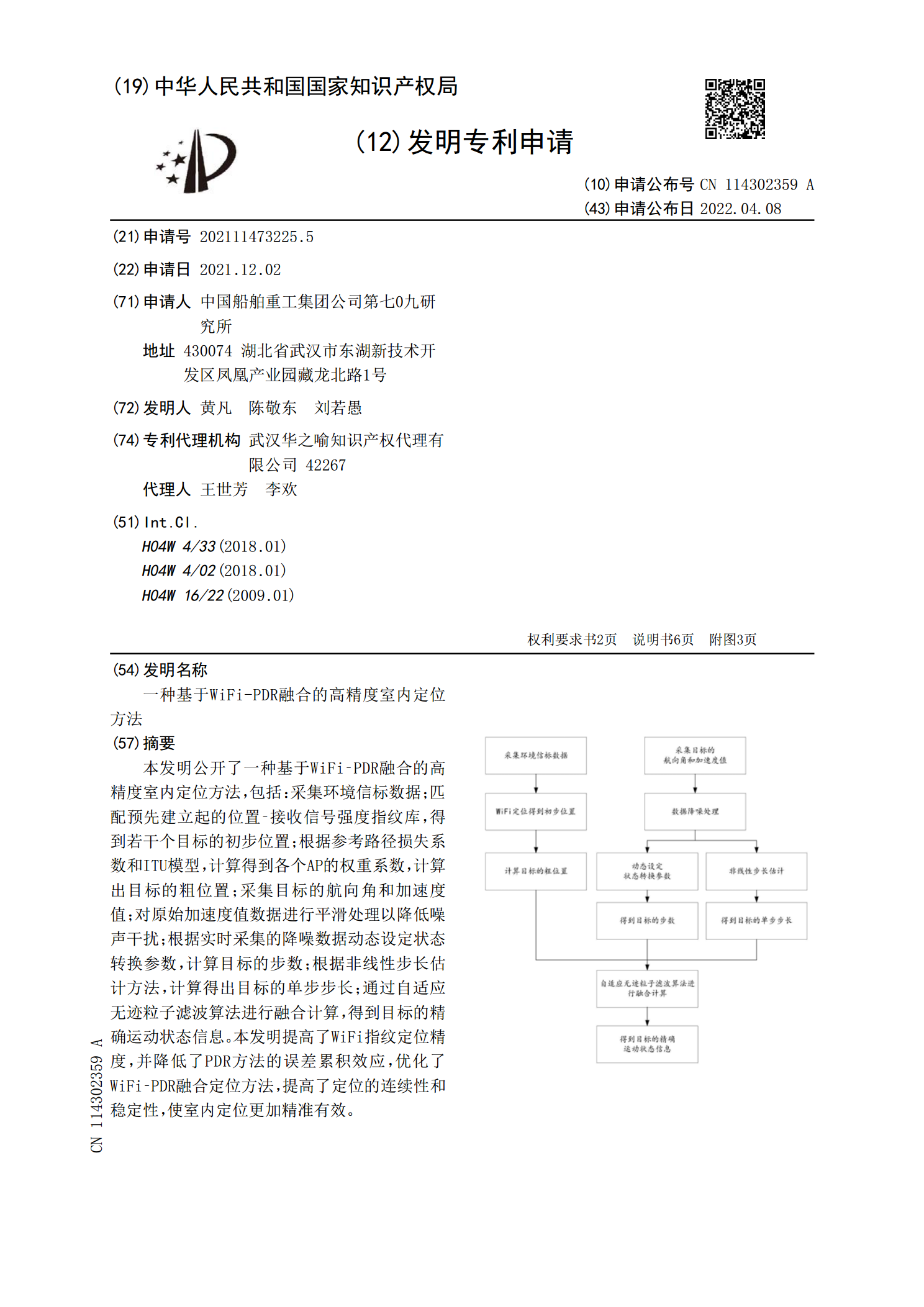
本发明公开了一种基于WiFi‑PDR融合的高精度室内定位方法,包括:采集环境信标数据;匹配预先建立起的位置‑接收信号强度指纹库,得到若干个目标的初步位置;根据参考路径损失系数和ITU模型,计算得到各个AP的权重系数,计算出目标的粗位置;采集目标的航向角和加速度值;对原始加速度值数据进行平滑处理以降低噪声干扰;根据实时采集的降噪数据动态设定状态转换参数,计算目标的步数;根据非线性步长估计方法,计算得出目标的单步步长;通过自适应无迹粒子滤波算法进行融合计算,得到目标的精确运动状态信息。本发明提高了WiFi指纹

基于PDR的高精度室内融合定位方法研究.docx
基于PDR的高精度室内融合定位方法研究基于PDR的高精度室内融合定位方法研究摘要:随着室内定位的需求日益增长,研究高精度的室内定位方法变得尤为重要。惯性测量单元(IMU)与步态检测技术的结合,即PDR(PedestrianDeadReckoning)技术,被广泛应用于室内定位中。然而,由于步行时的姿态变化和噪声导致的误差累积,PDR技术仍存在定位误差较大的问题。本文针对PDR技术中存在的问题展开研究,提出一种基于PDR的高精度室内融合定位方法,旨在提高室内定位的准确性和稳定性。1.引言室内定位是指在室内环