
基于自适应滑模的多智能体系统容错一致性控制算法.pptx

快乐****蜜蜂


1/10

2/10

3/10

4/10

5/10

6/10

7/10

8/10
9/10

10/10
亲,该文档总共27页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料

基于自适应滑模的多智能体系统容错一致性控制算法.pptx
,目录PartOne滑模控制算法原理自适应滑模控制算法的提出自适应滑模控制算法的优势PartTwo多智能体系统概述容错一致性控制算法原理容错一致性控制在多智能体系统中的应用PartThree算法设计思路算法实现过程算法性能分析PartFour仿真环境搭建仿真实验过程实验结果分析PartFive算法的优点算法的缺点改进方向与未来发展PartSix在多智能体系统中的应用前景在其他领域的应用可能性对未来发展的展望THANKS

基于自适应滑模的多智能体系统容错一致性控制算法.docx
基于自适应滑模的多智能体系统容错一致性控制算法标题:基于自适应滑模的多智能体系统容错一致性控制算法摘要:多智能体系统在各种工程领域中得到了广泛的应用。然而,由于多智能体系统的复杂性和不确定性,容错一致性控制一直是一个具有挑战性的问题。为解决此问题,本文提出了一种基于自适应滑模的多智能体系统容错一致性控制算法。该算法通过引入自适应机制和滑模控制策略,能够实现多智能体系统的容错一致性控制。1.引言多智能体系统是由多个相互交互的智能体组成的集合。在多智能体系统中,智能体之间的协同和通信是实现系统任务的关键。然而

基于自适应滑模的多螺旋桨浮空器容错控制.docx
基于自适应滑模的多螺旋桨浮空器容错控制基于自适应滑模的多螺旋桨浮空器容错控制1.引言随着无人机技术的快速发展,多螺旋桨浮空器在各个领域中的应用越来越广泛。然而,由于系统本身的复杂性和外部环境的不确定性,多螺旋桨浮空器在飞行过程中可能会遇到各种故障和异常情况。因此,容错控制技术对于保证多螺旋桨浮空器的安全和稳定飞行具有重要意义。2.多螺旋桨浮空器系统建模多螺旋桨浮空器系统包括飞行控制器、传感器、执行器和浮空器本身。在进行容错控制设计之前,首先需要对多螺旋桨浮空器进行系统建模。可以采用物理模型或者数学模型进行

基于自适应技术的多智能体系统容错包容控制算法研究的开题报告.docx
基于自适应技术的多智能体系统容错包容控制算法研究的开题报告一、选题背景随着多智能体系统在复杂环境中的应用越来越广泛,如智能交通系统、无人机系统、智能制造系统等,其容错包容控制能力成为了该领域的一个重要问题。面对多智能体系统中可能发生的不可预见故障或部分智能体失效的情况,如何确保系统仍能保持正常运行,维持系统的整体性能,从而达到容错和包容控制的目的,成为了当前研究的重点。二、研究内容本文将围绕多智能体系统中的容错包容控制问题展开研究,结合自适应技术,提出一种基于自适应技术的多智能体系统容错包容控制算法,并进
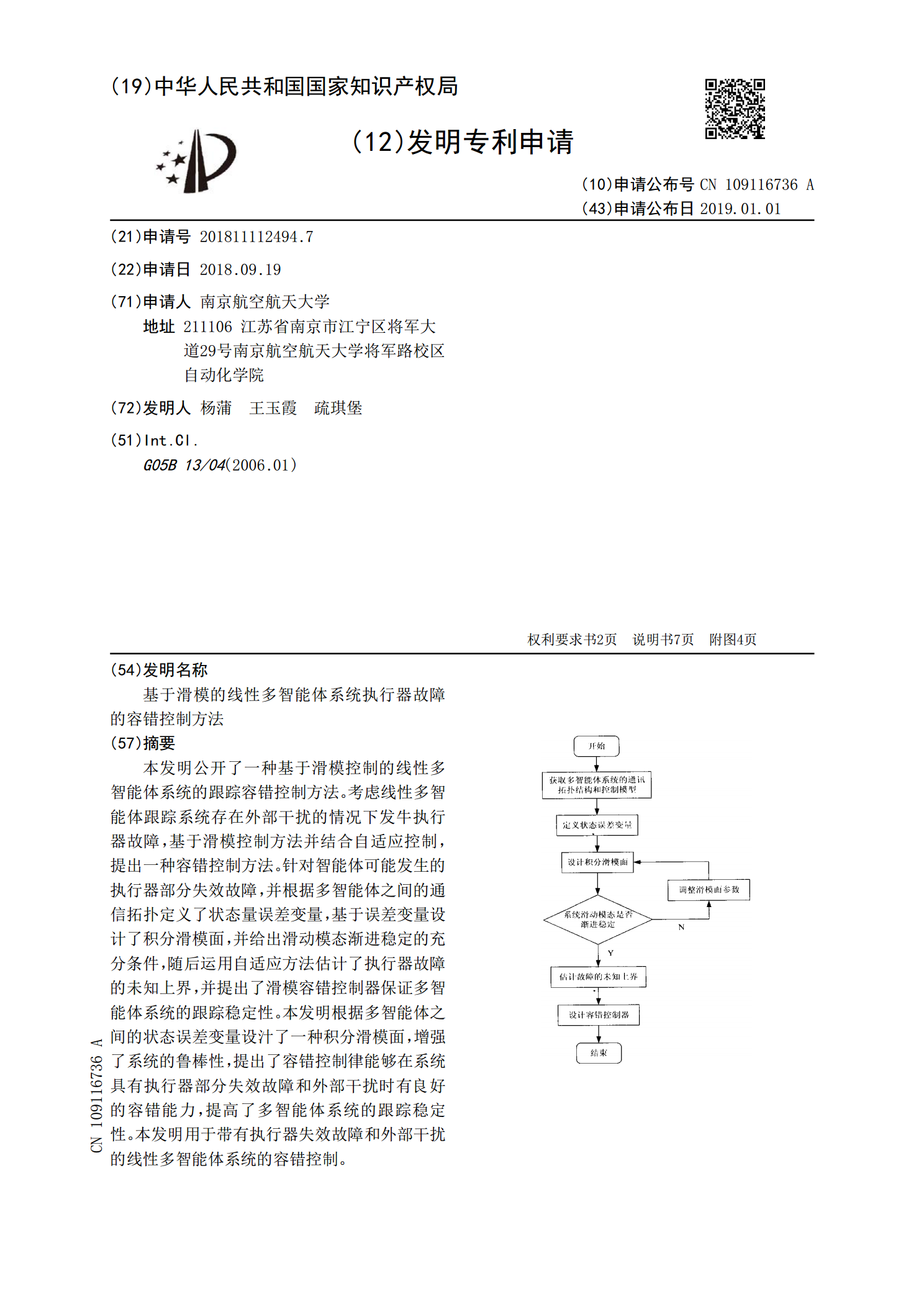
基于滑模的线性多智能体系统执行器故障的容错控制方法.pdf
本发明公开了一种基于滑模控制的线性多智能体系统的跟踪容错控制方法。考虑线性多智能体跟踪系统存在外部干扰的情况下发牛执行器故障,基于滑模控制方法并结合自适应控制,提出一种容错控制方法。针对智能体可能发生的执行器部分失效故障,并根据多智能体之间的通信拓扑定义了状态量误差变量,基于误差变量设计了积分滑模面,并给出滑动模态渐进稳定的充分条件,随后运用自适应方法估计了执行器故障的未知上界,并提出了滑模容错控制器保证多智能体系统的跟踪稳定性。本发明根据多智能体之间的状态误差变量设汁了一种积分滑模面,增强了系统的鲁棒性