
基于滑模的线性多智能体系统执行器故障的容错控制方法.pdf

元容****少女

1/10
2/10

3/10

4/10

5/10
6/10
7/10
8/10
9/10

10/10
亲,该文档总共14页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料
基于滑模的线性多智能体系统执行器故障的容错控制方法.pdf
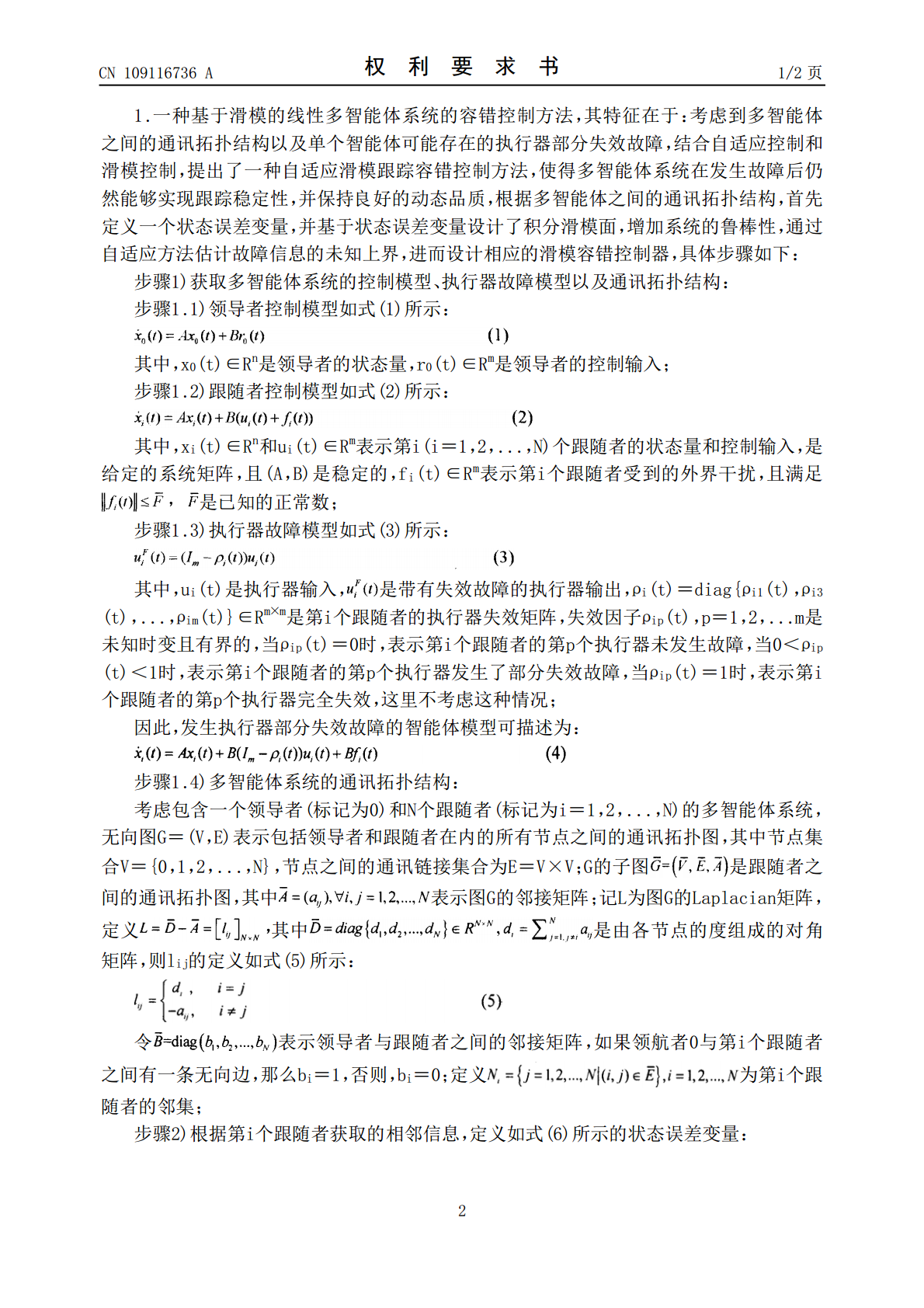
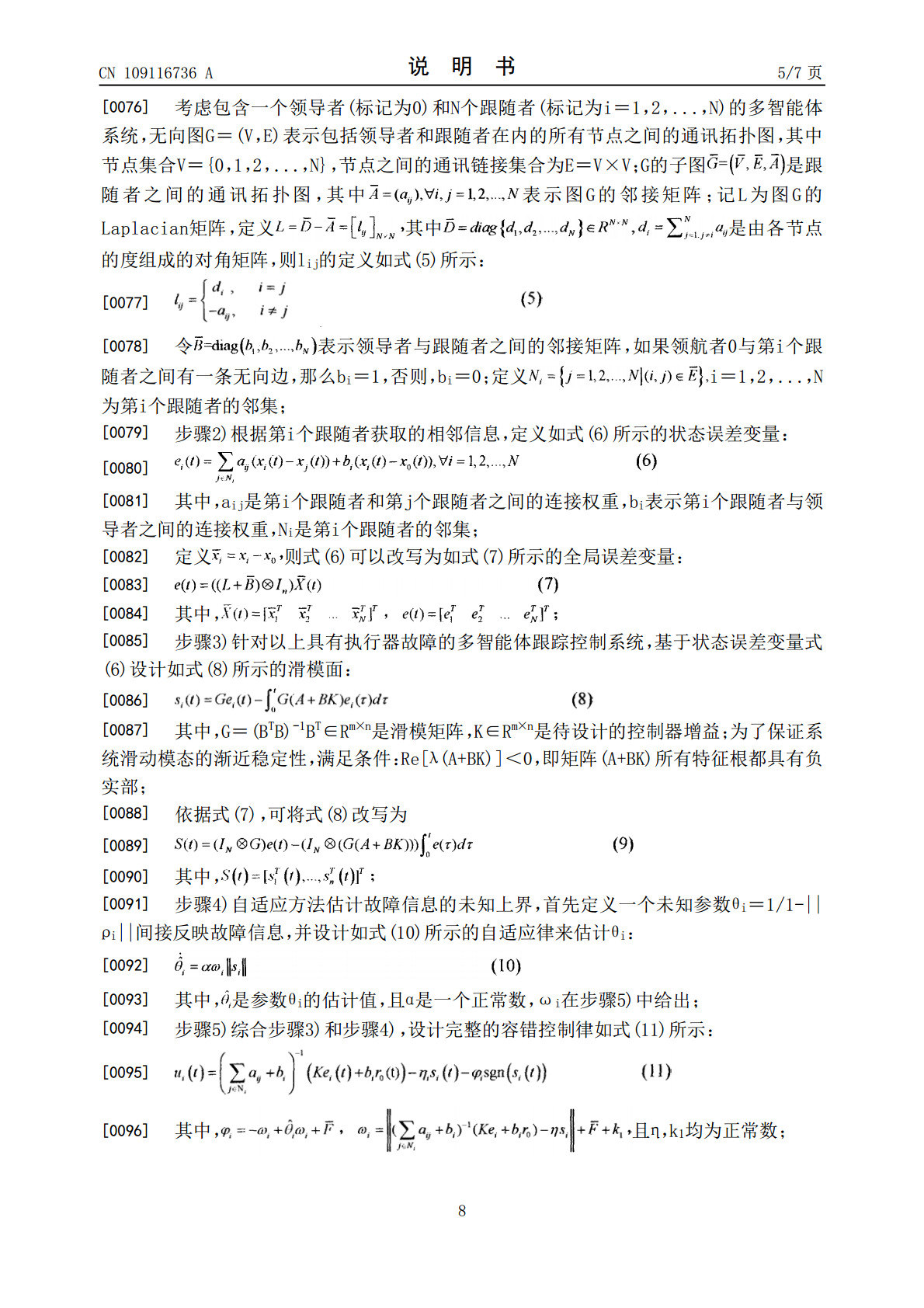
本发明公开了一种基于滑模控制的线性多智能体系统的跟踪容错控制方法。考虑线性多智能体跟踪系统存在外部干扰的情况下发牛执行器故障,基于滑模控制方法并结合自适应控制,提出一种容错控制方法。针对智能体可能发生的执行器部分失效故障,并根据多智能体之间的通信拓扑定义了状态量误差变量,基于误差变量设计了积分滑模面,并给出滑动模态渐进稳定的充分条件,随后运用自适应方法估计了执行器故障的未知上界,并提出了滑模容错控制器保证多智能体系统的跟踪稳定性。本发明根据多智能体之间的状态误差变量设汁了一种积分滑模面,增强了系统的鲁棒性

基于新型终端滑模的航天器执行器故障容错姿态控制.docx
基于新型终端滑模的航天器执行器故障容错姿态控制近年来,航天器在科技的不断发展下成为了人们研究的热点之一。对航天器进行良好的姿态控制显得尤为重要,然而由于执行器故障等原因,姿态控制系统可能会出现失效,从而影响航天器的运行。因此,如何在执行器故障的情况下保持航天器的姿态控制成为了一个备受关注的研究课题。基于现有研究成果和实际情况,本文提出了一种新型的终端滑模控制方法,在执行器故障的情况下,实现了航天器的姿态控制,以保持其稳定的飞行状态。该方法结合了滑模控制与终端控制两种方法的优势,通过建立系统动力学模型,设计

基于自适应滑模的多智能体系统容错一致性控制算法.pptx
,目录PartOne滑模控制算法原理自适应滑模控制算法的提出自适应滑模控制算法的优势PartTwo多智能体系统概述容错一致性控制算法原理容错一致性控制在多智能体系统中的应用PartThree算法设计思路算法实现过程算法性能分析PartFour仿真环境搭建仿真实验过程实验结果分析PartFive算法的优点算法的缺点改进方向与未来发展PartSix在多智能体系统中的应用前景在其他领域的应用可能性对未来发展的展望THANKS

基于自适应滑模的多智能体系统容错一致性控制算法.docx
基于自适应滑模的多智能体系统容错一致性控制算法标题:基于自适应滑模的多智能体系统容错一致性控制算法摘要:多智能体系统在各种工程领域中得到了广泛的应用。然而,由于多智能体系统的复杂性和不确定性,容错一致性控制一直是一个具有挑战性的问题。为解决此问题,本文提出了一种基于自适应滑模的多智能体系统容错一致性控制算法。该算法通过引入自适应机制和滑模控制策略,能够实现多智能体系统的容错一致性控制。1.引言多智能体系统是由多个相互交互的智能体组成的集合。在多智能体系统中,智能体之间的协同和通信是实现系统任务的关键。然而

具有执行器故障的多智能体系统的容错一致性控制.docx
具有执行器故障的多智能体系统的容错一致性控制标题:具有执行器故障的多智能体系统的容错一致性控制摘要:多智能体系统在各个领域中得到了广泛的应用,但由于执行器故障的存在,这些系统在实际应用中会面临容错一致性控制的挑战。容错一致性控制针对多智能体系统中执行器故障对整个系统的影响进行分析和控制,以保证系统仍能保持一致性。关键词:多智能体系统,容错,一致性控制,执行器故障引言:多智能体系统由多个智能体协同工作而成,具有分布式决策和控制的特点,可以应用于机器人、无人机、交通系统等众多领域。然而,在实际应用中,由于各种