
一种融合激光与视觉传感器的栅格地图构建方法.pptx

快乐****蜜蜂


1/10

2/10

3/10

4/10

5/10

6/10

7/10

8/10

9/10

10/10
亲,该文档总共25页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料

一种融合激光与视觉传感器的栅格地图构建方法.pptx
一种融合激光与视觉传感器的栅格地图构建方法目录栅格地图构建方法概述栅格地图的定义与作用栅格地图的构建方法融合激光与视觉传感器在栅格地图构建中的必要性激光传感器在栅格地图构建中的应用激光传感器的工作原理激光传感器在栅格地图构建中的优势激光传感器在栅格地图构建中的局限性视觉传感器在栅格地图构建中的应用视觉传感器的工作原理视觉传感器在栅格地图构建中的优势视觉传感器在栅格地图构建中的局限性融合激光与视觉传感器的栅格地图构建方法融合激光与视觉传感器的栅格地图构建方法概述数据融合算法的实现栅格地图的生成与优化融合方法

双目立体视觉栅格地图构建方法.docx
双目立体视觉栅格地图构建方法标题:双目立体视觉栅格地图构建方法摘要:双目立体视觉栅格地图构建方法是一种将双目摄像头采集的图像信息转化为栅格地图的技术。这种方法可以应用于自动驾驶、机器人导航以及虚拟现实等领域。本论文将详细介绍双目立体视觉栅格地图构建的基本原理、步骤以及常用的算法。同时,还会介绍一些应用实例,并讨论双目立体视觉栅格地图构建方法的优缺点以及未来发展方向。一、引言双目立体视觉是一种通过两个摄像头模拟人眼的视觉系统,利用两个从不同角度拍摄的图像来获取场景的深度信息。立体视觉栅格地图是将双目视觉的深

激光与视觉融合的同时定位与地图构建研究.docx
激光与视觉融合的同时定位与地图构建研究激光与视觉融合的同时定位与地图构建研究摘要:随着机器人技术的快速发展,定位和地图构建是机器人技术应用中的重要问题。然而,单一传感器的局限性导致了定位和地图构建的困难。激光雷达和视觉传感器作为常用的传感器之一,可以相互补充,形成激光与视觉融合的同时定位与地图构建方法。本文综述了激光与视觉融合的同时定位与地图构建的研究,并对其技术原理、应用场景以及存在的挑战进行了分析和讨论。关键词:激光雷达;视觉传感器;融合;同时定位与地图构建;机器人技术引言:定位和地图构建是机器人技术

一种融合激光和深度视觉传感器的SLAM地图创建方法.docx
一种融合激光和深度视觉传感器的SLAM地图创建方法SLAM(SimultaneousLocalizationandMapping)是目前机器人领域中比较重要的技术之一,它旨在实现机器人同时实时定位和构建环境地图,从而使机器人具备自主导航和探索环境的能力。目前SLAM技术已经有很多不同的实现方式,其中传统的基于激光雷达或单目/双目相机的方法被广泛应用于室内导航、自动驾驶等领域。然而,这些方法都存在一些局限性,例如激光雷达本身昂贵且难以集成在小型机器人中,相机在低光照或者无纹理场景下会出现视觉漂移等问题。最近
基于激光SLAM和视觉融合的变电站语义地图构建方法.pdf
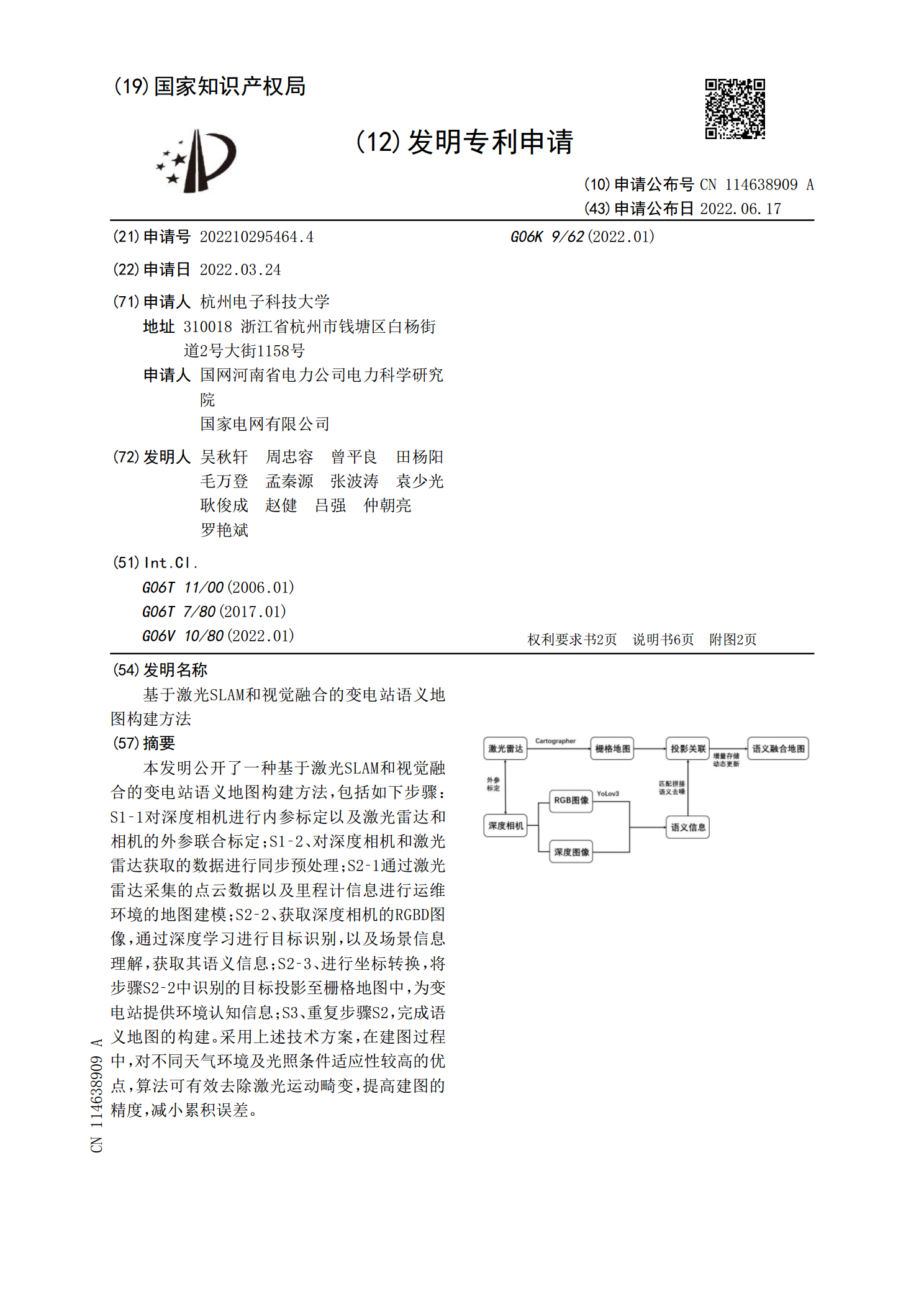
本发明公开了一种基于激光SLAM和视觉融合的变电站语义地图构建方法,包括如下步骤:S1?1对深度相机进行内参标定以及激光雷达和相机的外参联合标定;S1?2、对深度相机和激光雷达获取的数据进行同步预处理;S2?1通过激光雷达采集的点云数据以及里程计信息进行运维环境的地图建模;S2?2、获取深度相机的RGBD图像,通过深度学习进行目标识别,以及场景信息理解,获取其语义信息;S2?3、进行坐标转换,将步骤S2?2中识别的目标投影至栅格地图中,为变电站提供环境认知信息;S3、重复步骤S2,完成语义地图的构建。采用