
基于单目视觉里程计的移动机器人自定位方法.pptx

快乐****蜜蜂


1/10

2/10

3/10

4/10
5/10
6/10
7/10
8/10

9/10
10/10
亲,该文档总共22页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料
基于单目视觉里程计的移动机器人自定位方法.pptx
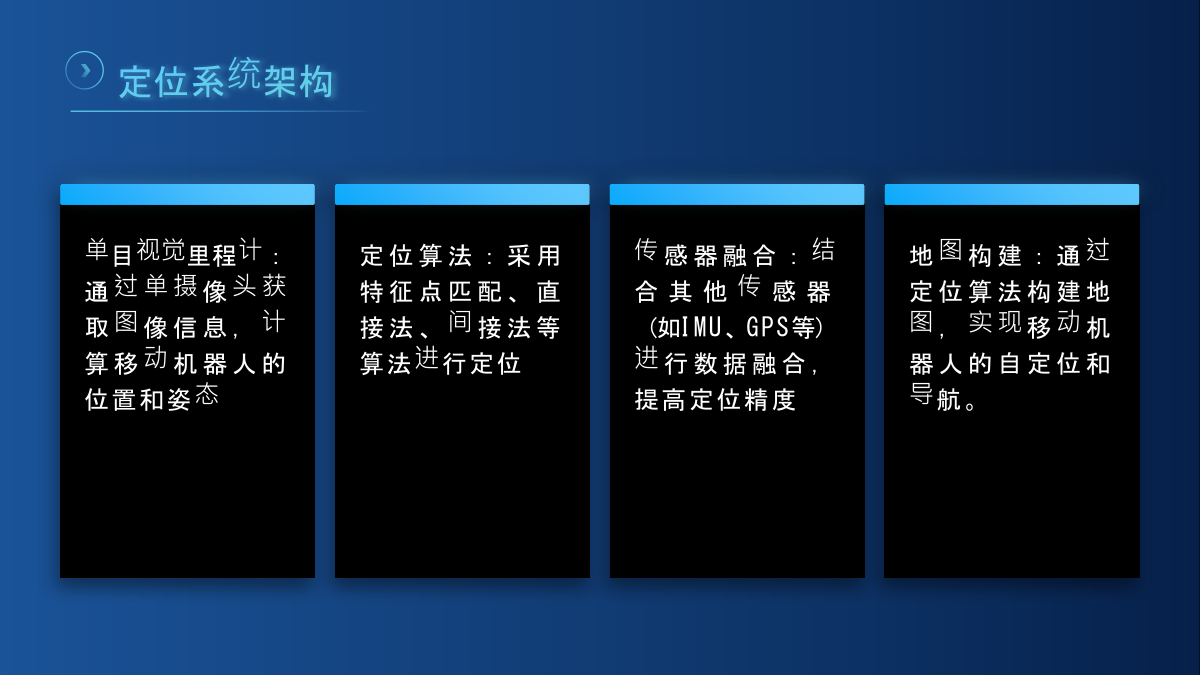
汇报人:CONTENTS添加章节标题单目视觉里程计原理视觉里程计定义视觉里程计工作原理特征点提取与匹配运动估计与位姿跟踪基于单目视觉里程计的移动机器人定位方法定位系统架构特征点提取与匹配优化运动估计与位姿跟踪算法改进定位精度与鲁棒性评估实验验证与结果分析实验场景与数据集实验环境:室内环境,地面平坦,无障碍物实验设备:单目摄像头,移动机器人,计算机实验步骤:a.初始化:设置摄像头参数,机器人初始位置b.数据采集:机器人在环境中移动,采集图像数据c.计算里程:使用单目视觉里程计算法计算机器人位置d.结果分析:

基于单目视觉里程计的移动机器人自定位方法.docx
基于单目视觉里程计的移动机器人自定位方法基于单目视觉里程计的移动机器人自定位方法摘要:移动机器人的自定位技术是机器人导航和环境理解的基础。单目视觉里程计是一种常用的视觉里程计方法,可以通过机器人摄像头观测到的连续图像序列来计算机器人的位置和姿态。本文基于单目视觉里程计方法,研究了移动机器人的自定位方法,并进行了实验验证。实验结果表明,基于单目视觉里程计的自定位方法具有较高的定位精度和实时性。1.引言随着移动机器人的应用领域的不断扩大,自定位技术成为移动机器人研究的重要方向之一。传统的自定位方法主要依赖于全

基于单目深度估计的视觉里程计算法.docx
基于单目深度估计的视觉里程计算法基于单目深度估计的视觉里程计算法摘要:视觉里程计是指通过摄像头观察环境来估计运动的方法。传统的视觉里程计算法通常基于特征点匹配或特征描述符来求解相机的位姿变化。然而,这些方法在遇到低纹理、光照变化或者动态物体的情况下效果不佳。近年来,随着深度学习的兴起,基于单目深度估计的视觉里程计算法逐渐受到关注。本论文旨在介绍目前流行的基于单目深度估计的视觉里程计算法,并分析其优缺点,最后展望未来的研究方向。关键词:视觉里程计、单目深度估计、深度学习、特征点匹配、特征描述符1.引言视觉里

基于单目直接法的水下视觉惯性里程计方法研究.docx
基于单目直接法的水下视觉惯性里程计方法研究基于单目直接法的水下视觉惯性里程计方法研究摘要:水下视觉惯性里程计是一项关键技术,广泛应用于水下机器人、潜水器、水下救援等领域。本文针对水下环境的特殊性,提出了一种基于单目直接法的水下视觉惯性里程计方法。通过分析水下光照变化和水下图像的失真问题,结合惯性测量单元(IMU)提供的姿态信息,实现了水下视觉里程计的鲁棒性和精确性。实验结果表明,本方法在水下环境下具有良好的定位精度和鲁棒性。关键词:水下视觉、惯性里程计、单目直接法、光照变化、失真、鲁棒性、精确性1.引言水

基于单目深度估计的低功耗视觉里程计.pptx
基于单目深度估计的低功耗视觉里程计目录添加章节标题单目深度估计技术深度估计原理单目深度估计方法算法优化与实现精度与效率评估低功耗视觉里程计系统系统架构与组成传感器数据处理里程计算法实现系统功耗优化实验与验证实验场景与数据集实验方法与过程实验结果与分析性能对比与优势分析应用前景与挑战自动驾驶领域应用移动机器人领域应用技术挑战与发展趋势低功耗技术的未来发展结论与展望研究成果总结未来研究方向展望THANKYOU