
基于激光点云NDT特征的两步回环检测.pptx

快乐****蜜蜂


1/10

2/10

3/10

4/10

5/10

6/10

7/10

8/10

9/10

10/10
亲,该文档总共23页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料

基于激光点云NDT特征的两步回环检测.pptx
汇报人:CONTENTS添加章节标题激光点云NDT特征提取激光点云数据预处理NDT特征描述子计算特征筛选与优化特征稳定性分析两步回环检测算法初始回环检测精确回环检测回环检测结果评估算法优势与局限性分析实验验证与结果分析实验数据集介绍实验设置与参数调整实验结果展示结果分析与讨论应用前景与展望在SLAM系统中的应用价值在机器人自主导航中的潜在应用未来研究方向与挑战汇报人:

基于ICP和NDT的激光点云匹配方法研究.docx
基于ICP和NDT的激光点云匹配方法研究摘要:ICP(IterativeClosestPoint)和NDT(NormalDistributionTransform)是当前比较流行的激光点云匹配方法。两者各有优点,但也存在一些缺陷。近年来,研究者尝试将两者结合起来,以克服各自的缺陷。本文主要介绍ICP和NDT的基本原理及其缺陷,并探讨将两者结合的方法,即ICP-NDT算法。实验结果表明,ICP-NDT算法具有较高的匹配精度和鲁棒性,适用于多种复杂场景。关键词:激光点云,ICP,NDT,匹配精度,鲁棒性,IC

基于全局特征描述子的激光SLAM回环检测方法.docx
基于全局特征描述子的激光SLAM回环检测方法激光SLAM(SimultaneousLocalizationandMapping)是一种使用激光传感器进行环境建图和自主定位的技术。在激光SLAM中,回环检测是一个重要的环节,通过检测到之前出现过的位置,可以提高定位精度和地图一致性。本文介绍一种基于全局特征描述子的激光SLAM回环检测方法。一、激光SLAM基本原理激光SLAM是通过激光传感器扫描环境物体的位置和形状信息,然后根据机器人运动轨迹和激光数据,生成一个二维或三维建图。同时,机器人当前位置和姿态也被计
基于点云强度与高度信息的回环检测方法及设备.pdf
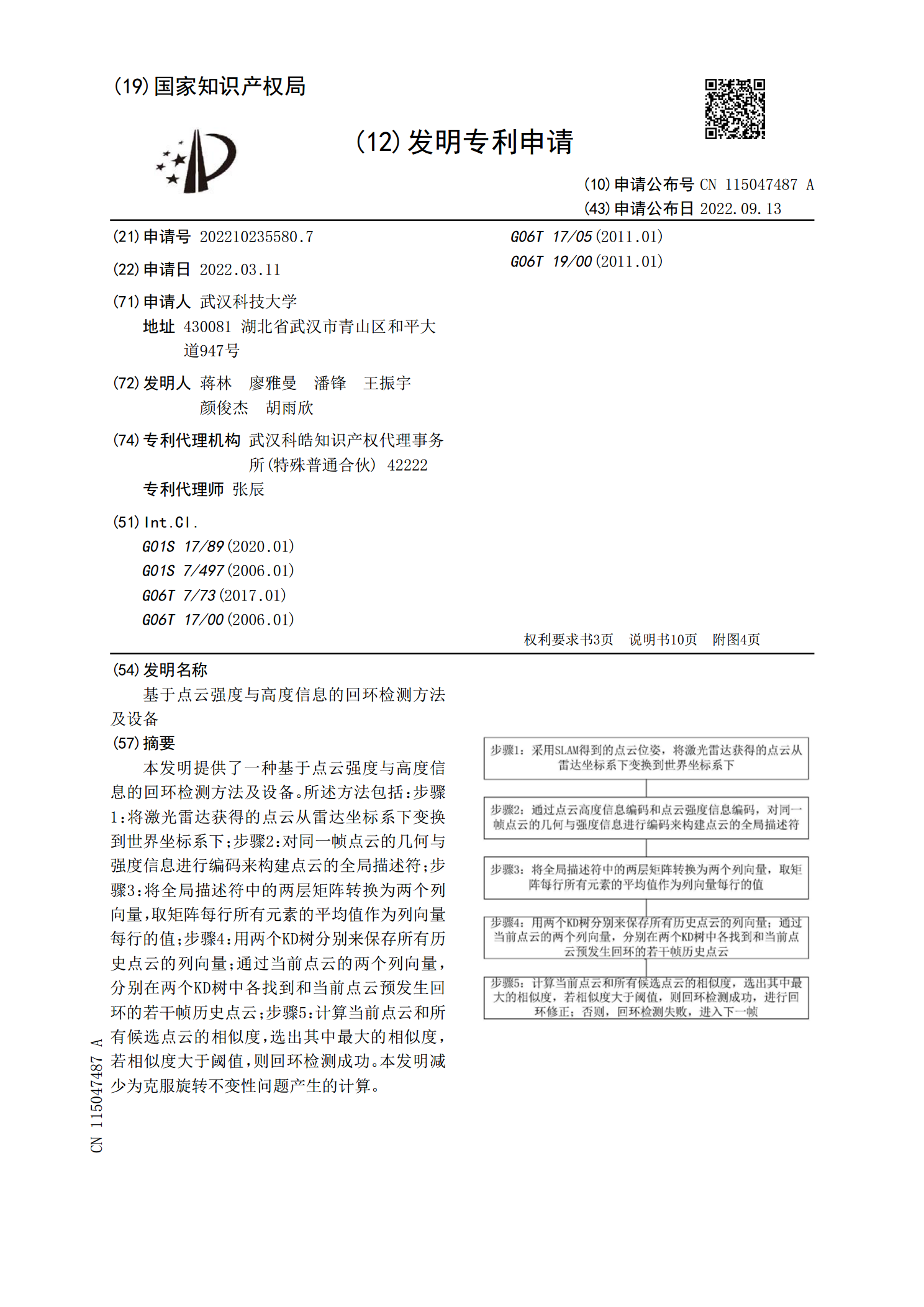
本发明提供了一种基于点云强度与高度信息的回环检测方法及设备。所述方法包括:步骤1:将激光雷达获得的点云从雷达坐标系下变换到世界坐标系下;步骤2:对同一帧点云的几何与强度信息进行编码来构建点云的全局描述符;步骤3:将全局描述符中的两层矩阵转换为两个列向量,取矩阵每行所有元素的平均值作为列向量每行的值;步骤4:用两个KD树分别来保存所有历史点云的列向量;通过当前点云的两个列向量,分别在两个KD树中各找到和当前点云预发生回环的若干帧历史点云;步骤5:计算当前点云和所有候选点云的相似度,选出其中最大的相似度,若相

基于B-SHOT特征和3D-NDT的点云自动配准.docx
基于B-SHOT特征和3D-NDT的点云自动配准基于B-SHOT特征和3D-NDT的点云自动配准摘要:点云配准是许多计算机视觉和机器人应用中的关键问题之一。本文提出了一种基于B-SHOT特征和3D-NDT的点云自动配准方法。该方法先使用B-SHOT特征对点云进行描述,然后使用3D-NDT算法对点云进行初始化,并通过迭代优化来进一步改善配准结果。实验结果表明,该方法在不同的场景下都能够获得较好的配准效果,并且具有较高的鲁棒性和计算效率。关键词:点云配准,B-SHOT特征,3D-NDT,迭代优化1.引言随着3