
基于点云强度与高度信息的回环检测方法及设备.pdf

春波****公主


1/10

2/10

3/10

4/10

5/10

6/10

7/10

8/10

9/10

10/10
亲,该文档总共18页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料
基于点云强度与高度信息的回环检测方法及设备.pdf
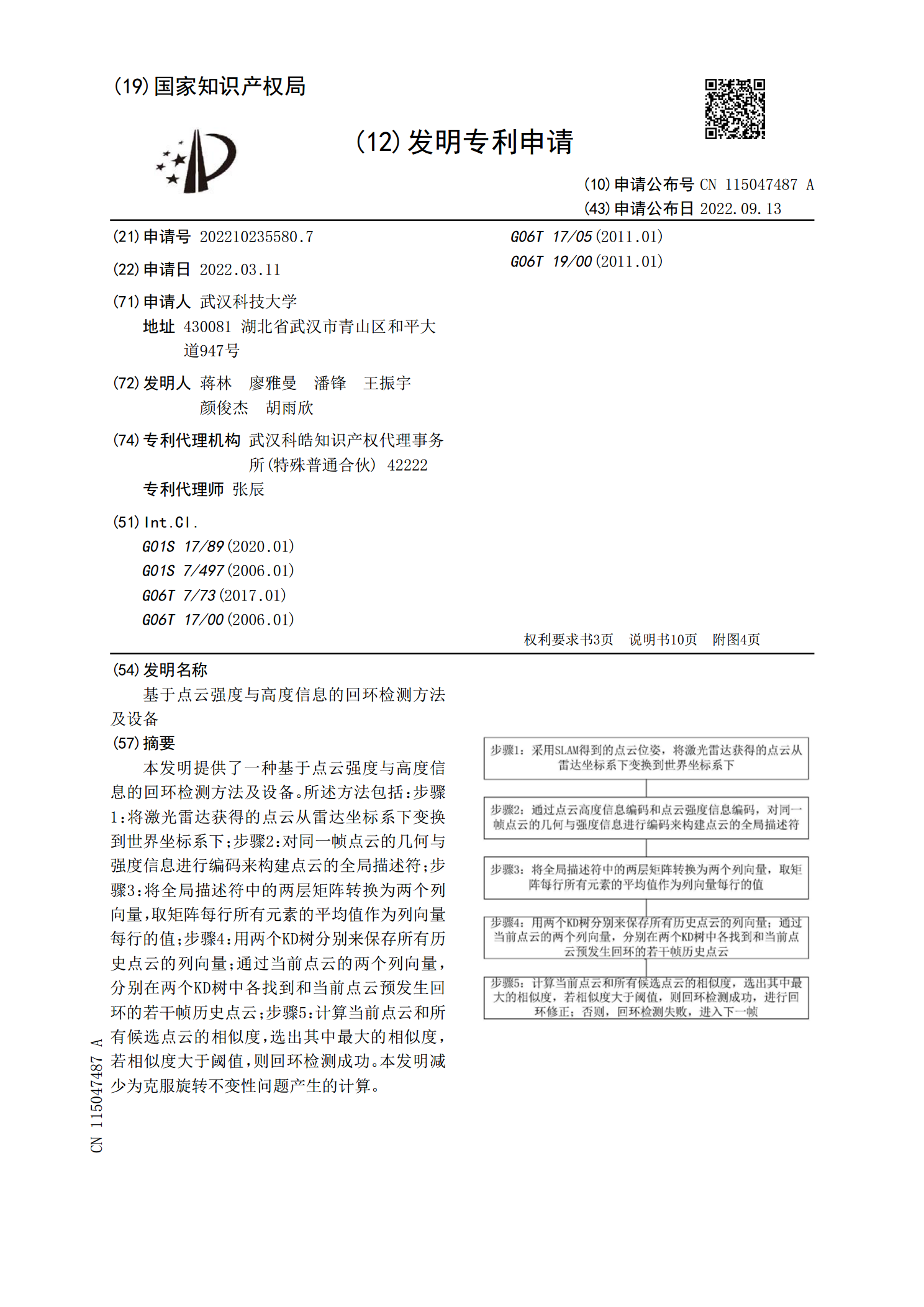
本发明提供了一种基于点云强度与高度信息的回环检测方法及设备。所述方法包括:步骤1:将激光雷达获得的点云从雷达坐标系下变换到世界坐标系下;步骤2:对同一帧点云的几何与强度信息进行编码来构建点云的全局描述符;步骤3:将全局描述符中的两层矩阵转换为两个列向量,取矩阵每行所有元素的平均值作为列向量每行的值;步骤4:用两个KD树分别来保存所有历史点云的列向量;通过当前点云的两个列向量,分别在两个KD树中各找到和当前点云预发生回环的若干帧历史点云;步骤5:计算当前点云和所有候选点云的相似度,选出其中最大的相似度,若相

基于点云强度的公园乔木检测方法.docx
基于点云强度的公园乔木检测方法摘要在城市化进程中,公园建设成为城市基础设施的重要组成部分。公园内乔木的监测对于城市绿化管理和保护有着至关重要的作用。传统的人工巡查方式浪费时间和人力资源,而基于点云强度的公园乔木检测方法则能够实现快速、高效的乔木监测。本文提出了一种基于点云强度的公园乔木检测方法,通过对点云数据进行处理,实现了公园乔木的自动化检测。本文首先介绍了公园乔木检测的研究背景和意义,随后分析了点云强度技术的基本原理和相关算法,并阐述了点云强度在公园乔木检测中的应用。接着,本文针对公园乔木特点,提出了

基于点云强度的公园乔木检测方法.docx
基于点云强度的公园乔木检测方法基于点云强度的公园乔木检测方法摘要随着城市化进程的加速和人们对绿化环境需求的提高,公园乔木的管理和检测变得越来越重要。本文提出了一种基于点云强度的公园乔木检测方法。首先,通过激光扫描仪获取公园乔木的三维点云数据,并计算每个点的强度值。然后,根据点云强度的分布情况和公园乔木的特征,进行乔木的检测和分割。最后,通过实验验证了本文方法的有效性,并对未来的研究方向进行了展望。关键词:点云强度,公园乔木,激光扫描仪,分割1.引言公园作为城市绿化的重要组成部分,乔木的管理和检测对于维护公

回环检测方法、点云地图构建方法、电子设备及存储介质.pdf
本发明涉及一种回环检测方法、点云地图构建方法、电子设备及存储介质,该方法以主对象为中心构建主对象描述子,只需要两帧的主对象位置接近且能观测到同一场景中的一个或多个主对象即可,相比现有技术中以激光雷达为中心建立ScanContext描述子的方法,本发明提供的这种不依赖观测位置的描述子能解决ScanContext描述子在两帧位置不重合时无法进行回环检测的问题,扩大了回环检测的适用范围,提高了回环检测的鲁棒性。进一步地,由于最终计算出的当前关键帧和历史关键帧之间的相对位姿包含x、y方向的偏移和旋转角度,使得

基于激光点云NDT特征的两步回环检测.pptx
汇报人:CONTENTS添加章节标题激光点云NDT特征提取激光点云数据预处理NDT特征描述子计算特征筛选与优化特征稳定性分析两步回环检测算法初始回环检测精确回环检测回环检测结果评估算法优势与局限性分析实验验证与结果分析实验数据集介绍实验设置与参数调整实验结果展示结果分析与讨论应用前景与展望在SLAM系统中的应用价值在机器人自主导航中的潜在应用未来研究方向与挑战汇报人: