
被动柔性变刚度执行器及其特性研究的开题报告.docx

快乐****蜜蜂


1/3

2/3

3/3
在线预览结束,喜欢就下载吧,查找使用更方便
相关资料

被动柔性变刚度执行器及其特性研究的开题报告.docx
被动柔性变刚度执行器及其特性研究的开题报告题目:被动柔性变刚度执行器及其特性研究的开题报告摘要:被动柔性变刚度执行器是一种新型的机器人执行器,其具有优异的柔性和可控性能,可以广泛应用于机器人领域。本文旨在研究被动柔性变刚度执行器的基本原理及其特性,并对其在机器人领域中的应用进行探讨。首先,本文介绍了被动柔性变刚度执行器的基本结构,分析了其工作原理和特点;其次,通过对其力学模型进行建立与仿真分析,探究了不同参数对其力学行为的影响,为进一步研究提供了理论支持;最后,本文还探讨了其在机器人动力学控制、柔性姿态控

变刚度柔性手术执行器.pdf
本发明的实施例公开了一种变刚度柔性手术执行器,变刚度柔性手术执行器包括执行机构和驱动机构,执行机构包括第一安装件、第二安装件、第三安装件以及连接组件,连接组件包括多个第一连接件、多个第二连接件和多个第三连接件,第一连接件的一端与第一安装件相连,第二连接件的一端与第二安装件相连,第三连接件的一端与第三安装件相连,第一连接件的另一端穿过第二连接件,第二连接件的另一端穿过第三连接件,驱动机构与多个第一连接件的另一端和多个第二连接件的另一端相连,驱动机构可驱动多个第一连接件中的任意一个或多个移动以及驱动第二连接件
一种柔性主-被动变刚度关节.pdf
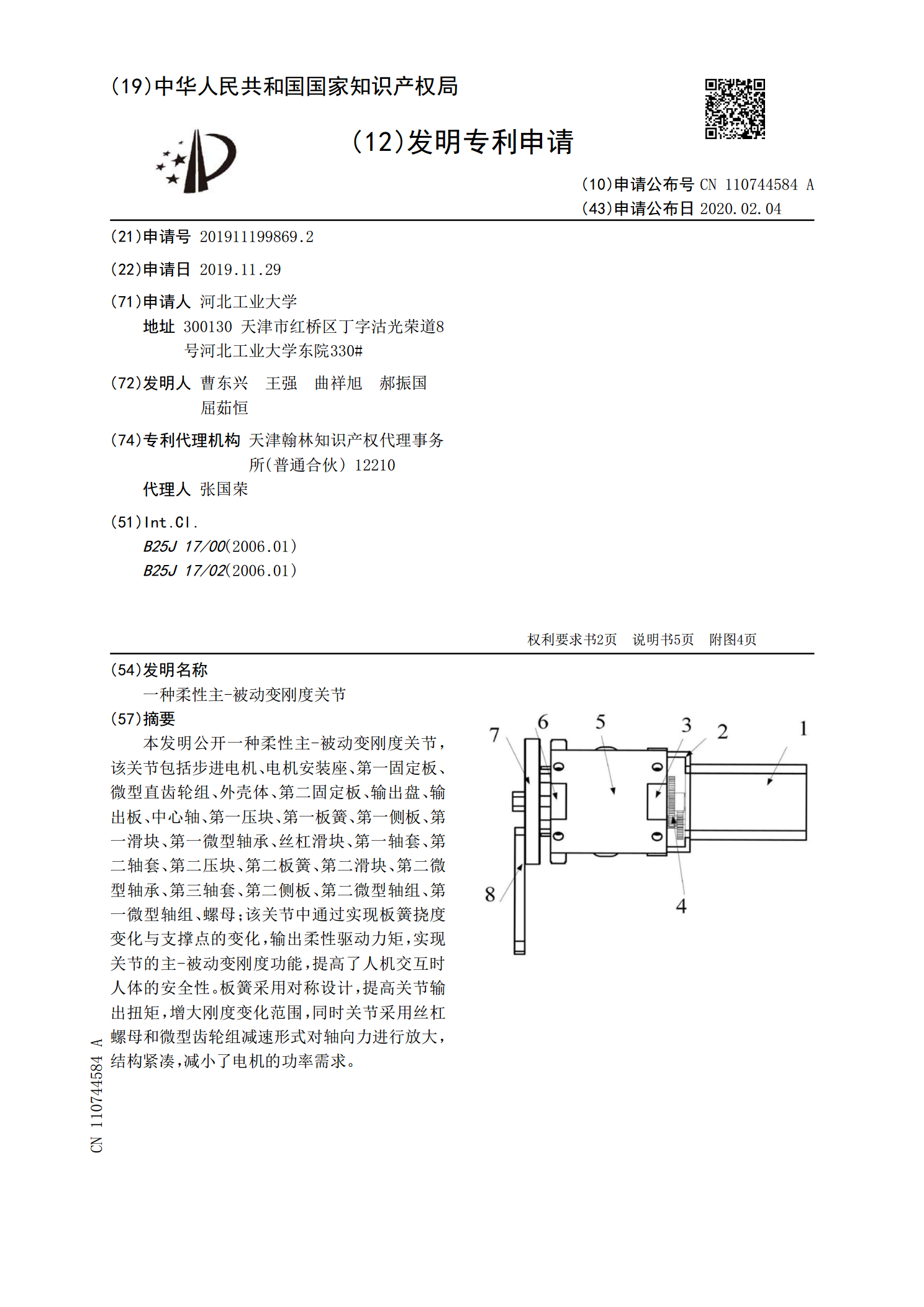
本发明公开一种柔性主‑被动变刚度关节,该关节包括步进电机、电机安装座、第一固定板、微型直齿轮组、外壳体、第二固定板、输出盘、输出板、中心轴、第一压块、第一板簧、第一侧板、第一滑块、第一微型轴承、丝杠滑块、第一轴套、第二轴套、第二压块、第二板簧、第二滑块、第二微型轴承、第三轴套、第二侧板、第二微型轴组、第一微型轴组、螺母;该关节中通过实现板簧挠度变化与支撑点的变化,输出柔性驱动力矩,实现关节的主‑被动变刚度功能,提高了人机交互时人体的安全性。板簧采用对称设计,提高关节输出扭矩,增大刚度变化范围,同时关节采用

高速铁路无砟轨道扣件刚度温变特性及其影响研究的开题报告.docx
高速铁路无砟轨道扣件刚度温变特性及其影响研究的开题报告一、研究背景随着高速铁路建设的不断推进,铁路无砟轨道扣件作为铁路轨道的重要组成部分,其质量和性能显得尤为重要。无砟轨道扣件的刚度温变特性是其质量和性能的一个重要指标。加强对该特性的研究,可以为无砟轨道扣件的质量控制和运用提供科学依据。二、研究目的本研究的目的是探究高速铁路无砟轨道扣件在温度变化下的刚度变化特性及其影响,为提高无砟轨道扣件的质量和性能提供科学依据。三、研究内容及方法本研究的研究内容包括:高速铁路无砟轨道扣件的刚度温变特性探究、刚度温变特性

弯折对ZnO基柔性薄膜阻变特性的影响研究的开题报告.docx
弯折对ZnO基柔性薄膜阻变特性的影响研究的开题报告一、选题背景:柔性电子技术是当今电子领域的重要技术之一,将被广泛应用于电子皮肤、智能穿戴等领域。在制作柔性电子产品时,常使用可弯曲的柔性基材,如聚酰亚胺,聚氨酯等,这些基材不仅具有较好的柔性,而且可以在不同表面涂布各种功能性元件。而在柔性电子产品的制作过程中,由于柔性基材的特性,经常需要将其弯折、拉伸、扭曲等方式来完成各种操作。但是,过度的弯曲对柔性材料以及电子设备的稳定性和生命周期会产生不良的影响。目前,氧化锌(ZnO)基柔性薄膜因具有较好的透明性、光电