
基于双目鱼眼镜头的标定方法研究的任务书.docx

快乐****蜜蜂


1/3

2/3

3/3
在线预览结束,喜欢就下载吧,查找使用更方便
相关资料

基于双目鱼眼镜头的标定方法研究.docx
基于双目鱼眼镜头的标定方法研究基于双目鱼眼镜头的标定方法研究摘要:近年来,双目视觉技术被广泛应用于各个领域,例如3D重建、目标跟踪和机器人导航等。而鱼眼镜头由于其广角特性和小型化设计,在双目视觉系统中变得越来越受欢迎。然而,由于鱼眼镜头畸变严重且不均匀,标定过程变得更为复杂。本文旨在研究基于双目鱼眼镜头的标定方法,通过对鱼眼畸变模型的理解和适当的数学处理,能够准确地获得双目相机的内外参数,提高系统的精度和稳定性。关键词:双目视觉、鱼眼镜头、标定方法、畸变模型、内外参数1.引言随着计算机视觉技术的不断发展,

基于双目鱼眼镜头的标定方法研究的任务书.docx
基于双目鱼眼镜头的标定方法研究的任务书任务书1.研究背景随着计算机视觉技术的不断发展,双目视觉技术已经得到了广泛的应用和研究。其中,基于双目鱼眼镜头的标定方法被广泛应用于机器人导航、三维建模等领域。然而,这种方法的标定误差经常较大,使得实际应用效果差强人意。2.研究目的本次研究旨在针对基于双目鱼眼镜头的标定方法进行深入研究,提出一种精度更高、稳定性更好的标定方法。具体目的如下:(1)分析现有标定方法存在的问题并寻找瓶颈。(2)在分析的基础上,提出一种新的标定方法,研究其理论及实现。(3)对新的标定方法进行

基于神经网络的双目远心镜头标定方法研究.pptx
汇报人:目录PARTONEPARTTWO标定方法的重要性传统标定方法介绍神经网络在标定中的应用PARTTHREE神经网络模型选择数据预处理与增强训练过程与优化实验结果与分析PARTFOUR与传统方法的比较与其他神经网络方法的比较优缺点分析PARTFIVE在机器人视觉中的应用在自动驾驶领域的应用未来研究方向与挑战THANKYOU
双目鱼眼相机的参数标定方法、装置、设备及存储介质.pdf
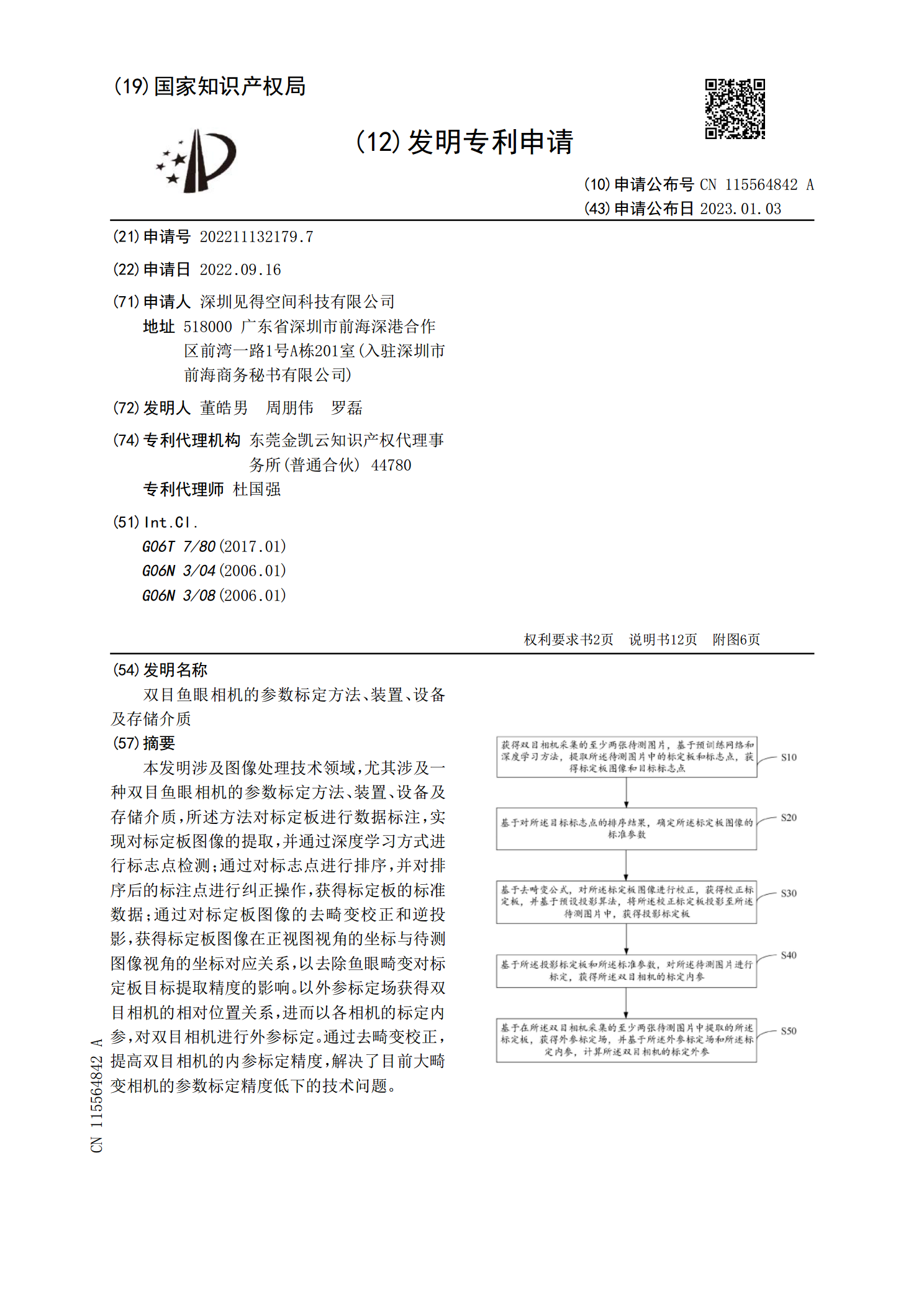
本发明涉及图像处理技术领域,尤其涉及一种双目鱼眼相机的参数标定方法、装置、设备及存储介质,所述方法对标定板进行数据标注,实现对标定板图像的提取,并通过深度学习方式进行标志点检测;通过对标志点进行排序,并对排序后的标注点进行纠正操作,获得标定板的标准数据;通过对标定板图像的去畸变校正和逆投影,获得标定板图像在正视图视角的坐标与待测图像视角的坐标对应关系,以去除鱼眼畸变对标定板目标提取精度的影响。以外参标定场获得双目相机的相对位置关系,进而以各相机的标定内参,对双目相机进行外参标定。通过去畸变校正,提高双目相

双目鱼眼简易布站系统目标定位算法研究的任务书.docx
双目鱼眼简易布站系统目标定位算法研究的任务书任务书背景介绍:简易布站系统是现代化的针对地质勘探中常见的地质数据采集的系统,其目的是为了更好地进行地质勘探中的数据采集和处理。简易布站系统是典型的传统质量控制技术,通过对采集点和站点的实地检查,来对现场勘探的质量进行评估和控制。然而,目前的简易布站系统在定位的准确性方面还存在一定的缺陷。为了解决这一问题,需要开发新的定位算法或者提升现有算法的定位准确性。任务目的:本次任务旨在开发一种基于双目鱼眼相机的简易布站系统目标定位算法。通过双目鱼眼相机的图像采集,结合图