
行星齿轮传动机构.ppt

lj****88


1/10
2/10
3/10
4/10
5/10
6/10
7/10

8/10
9/10
10/10
亲,该文档总共55页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料

行星齿轮机构传动.docx
行星齿轮传动速比计算方法综述杨桂香郭志强王明海杨珍(中国一拖集团有限公司,河南洛阳471039)摘要:以具有代表性的2K-H型行星齿轮传动为例,对行星齿轮传动速比常用的计算方法进行了介绍;分别用行星架固定法、力矩法、速度图解法等推导出2K-H型行星齿轮传动的特性方程;并对三种计算方法作简单对比,为行星齿轮传动设计和计算提供参考。关键词:行星齿轮传动;速比;计算方法中图分类号:U461.4文献标识码:A文章编号:SummaryofepicyclicgeartrainspeedratiocomputewayY
行星齿轮传动机构.pdf
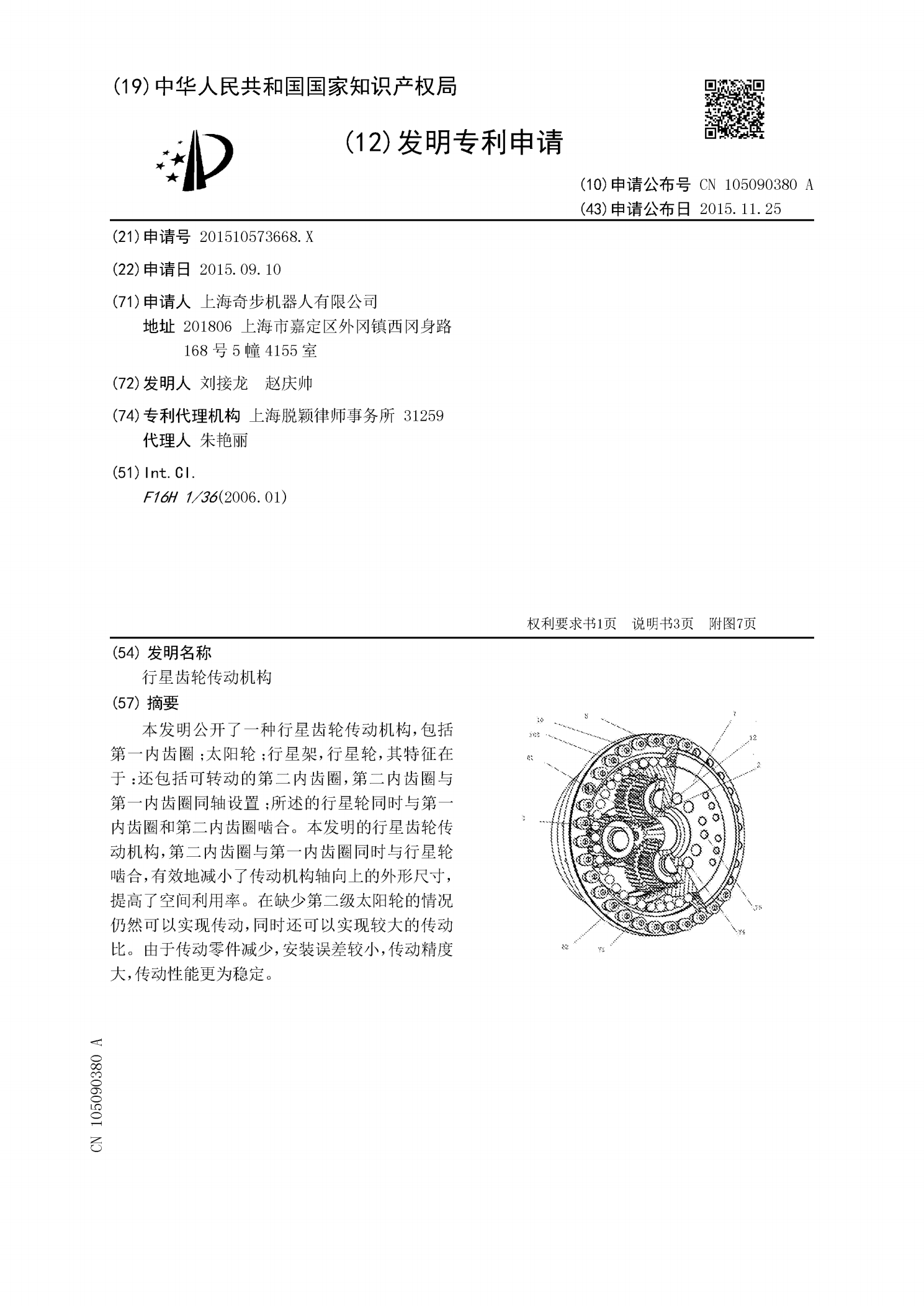
本发明公开了一种行星齿轮传动机构,包括第一内齿圈;太阳轮;行星架,行星轮,其特征在于:还包括可转动的第二内齿圈,第二内齿圈与第一内齿圈同轴设置;所述的行星轮同时与第一内齿圈和第二内齿圈啮合。本发明的行星齿轮传动机构,第二内齿圈与第一内齿圈同时与行星轮啮合,有效地减小了传动机构轴向上的外形尺寸,提高了空间利用率。在缺少第二级太阳轮的情况仍然可以实现传动,同时还可以实现较大的传动比。由于传动零件减少,安装误差较小,传动精度大,传动性能更为稳定。

行星齿轮传动机构.pdf
一种行星齿轮传动机构,其包括与输入轴一体旋转的输入锥齿轮、至少一个与该输入锥齿轮啮合的行星锥齿轮、由该至少一个行星锥齿轮的公转运动带动的输出齿轮以及与该至少一个行星锥齿轮啮合且固定设置的固定锥齿轮,该输入锥齿轮及固定锥齿轮分别设置于该输出齿轮的轴向两侧。该输出齿轮开设有沿径向贯穿的安装孔,该至少一个行星锥齿轮穿设该安装孔并与该输出齿轮转动连接,且该至少一个行星锥齿轮的自转中心线与该输出齿轮的回转中心线正交。上述行星齿轮传动机构具有结构紧凑及刚性较佳的优点。
行星齿轮传动机构.ppt
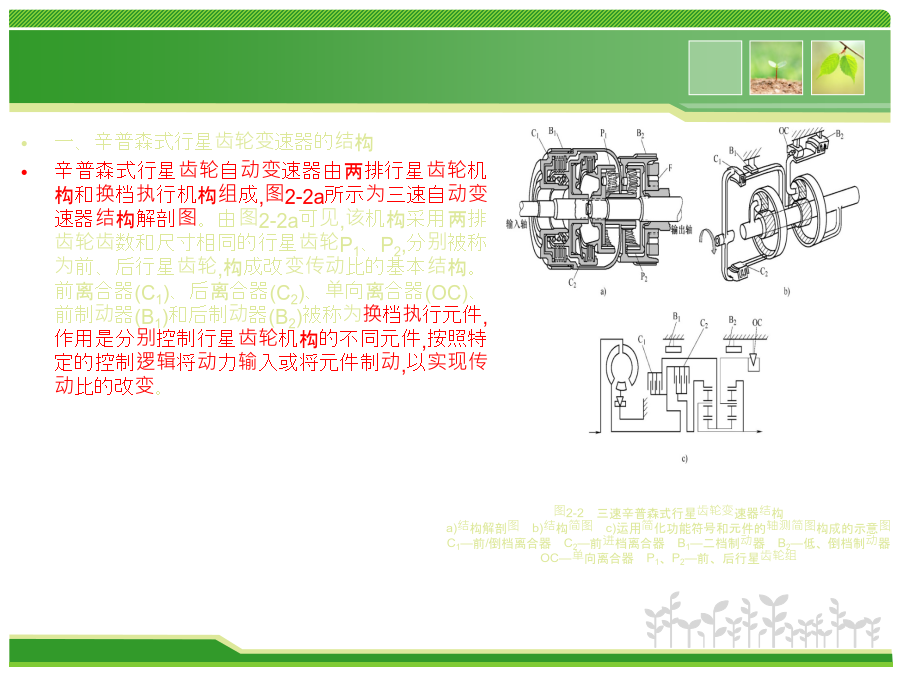
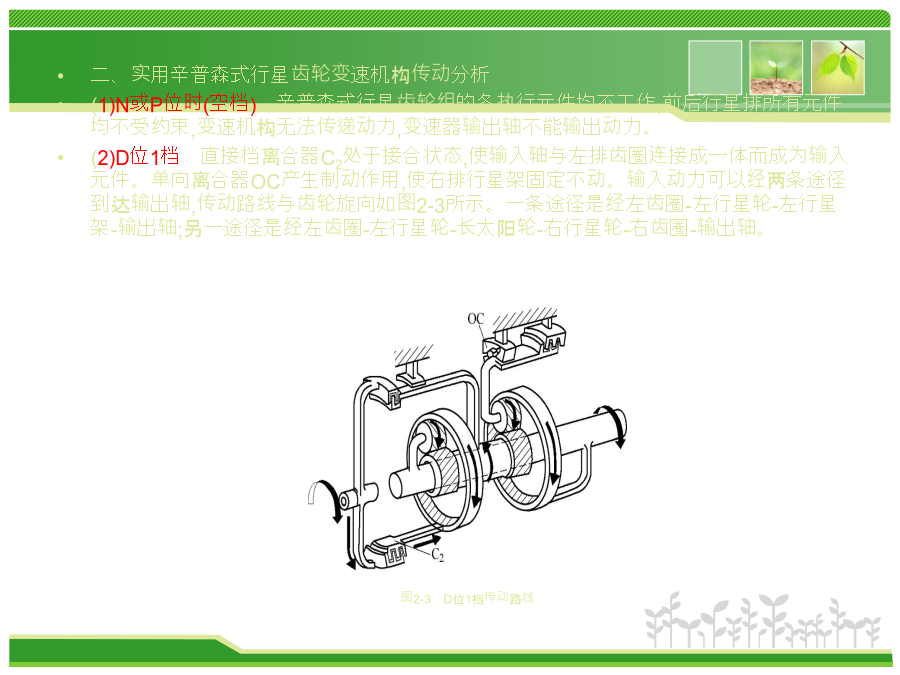
模块二典型行星齿轮传动机构知识目标1.掌握辛普森式、拉维娜式行星齿轮变速器的结构。2.理解辛普森式、拉维娜式行星齿轮变速器的工作原理。3.了解CR-CR行星齿轮变速器的结构特点及工作原理。技能目标1.会分析辛普森式、拉维娜式行星齿轮变速器的动力传动并计算传动比。2.能按照操作手册正确拆装辛普森式、拉维娜式行星齿轮变速器。由于液力变矩器的变矩系数尚无法满足汽车行驶需要,液力机械式自动变速器通常都采用齿轮式变速器作为其主要的变速装置,行星齿轮传动是最常采用的结构形式。行星齿轮变速器由行星齿轮机构和换档执行机构
行星齿轮传动机构.pdf
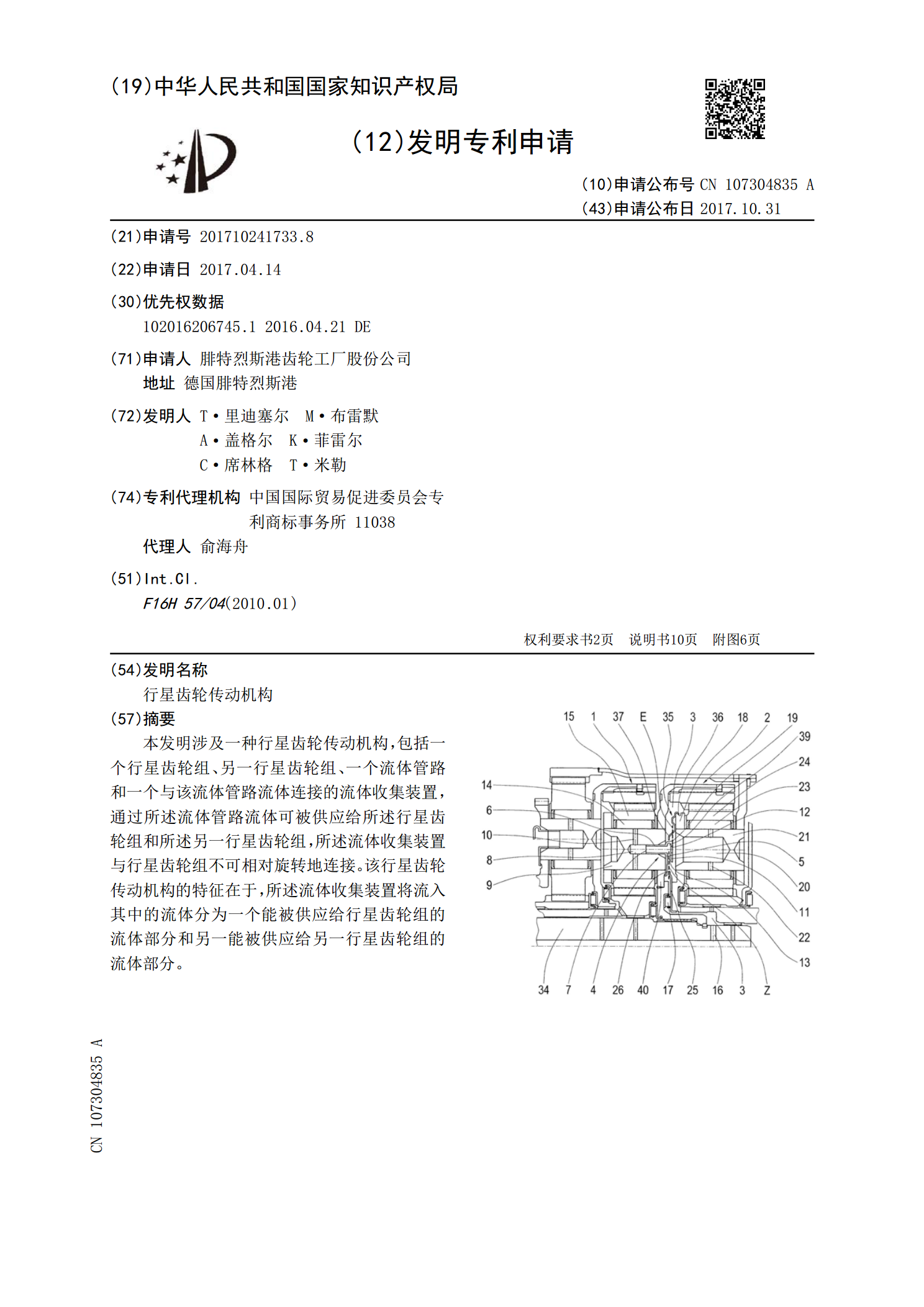
本发明涉及一种行星齿轮传动机构,包括一个行星齿轮组、另一行星齿轮组、一个流体管路和一个与该流体管路流体连接的流体收集装置,通过所述流体管路流体可被供应给所述行星齿轮组和所述另一行星齿轮组,所述流体收集装置与行星齿轮组不可相对旋转地连接。该行星齿轮传动机构的特征在于,所述流体收集装置将流入其中的流体分为一个能被供应给行星齿轮组的流体部分和另一能被供应给另一行星齿轮组的流体部分。