
基于机器视觉的叶片夹取机器人研究的任务书.docx

快乐****蜜蜂


1/3

2/3

3/3
在线预览结束,喜欢就下载吧,查找使用更方便
相关资料

基于机器视觉的叶片夹取机器人研究的任务书.docx
基于机器视觉的叶片夹取机器人研究的任务书任务书1.任务背景和意义随着工业自动化水平不断提高,机器人及其应用越来越广泛。叶片夹取机器人便是工业机器人的重要组成部分,其主要功能是将叶片从生产线上取下,进行检测和焊接等加工处理。传统的叶片夹取需要人工操作,生产效率低下、工作效率低下,而且还存在较大的安全风险,如误伤操作人员、叶片损坏等问题。因此,研发一种基于机器视觉的叶片夹取机器人已成为工业机器人领域的重要研究课题。本次报告将针对基于机器视觉的叶片夹取机器人的相关研究展开调研,该研究的意义在于:(1)提高叶片生

基于机器视觉的叶片夹取机器人研究的开题报告.docx
基于机器视觉的叶片夹取机器人研究的开题报告一、研究背景及意义机器人技术在现代制造业中扮演着越来越重要的角色。近年来,机器人技术的应用范围不断拓宽,其具有精度高、反应速度快、连续工作能力强等优点,已经广泛应用在汽车制造、电子制造、物流配送等行业中。其中,在一些操作复杂、环境危险、人工难以完成的任务中,如钻井、清洁垃圾、开采煤矿等方面,机器人技术的优势尤为突出。其中,机器视觉技术是机器人技术中的重要组成部分,能够实现对场景和目标的自动感知与理解。在工业生产中,往往需要执行对工件的夹取操作,而叶片夹取作为其中的
物品夹取方法及机器人.pdf
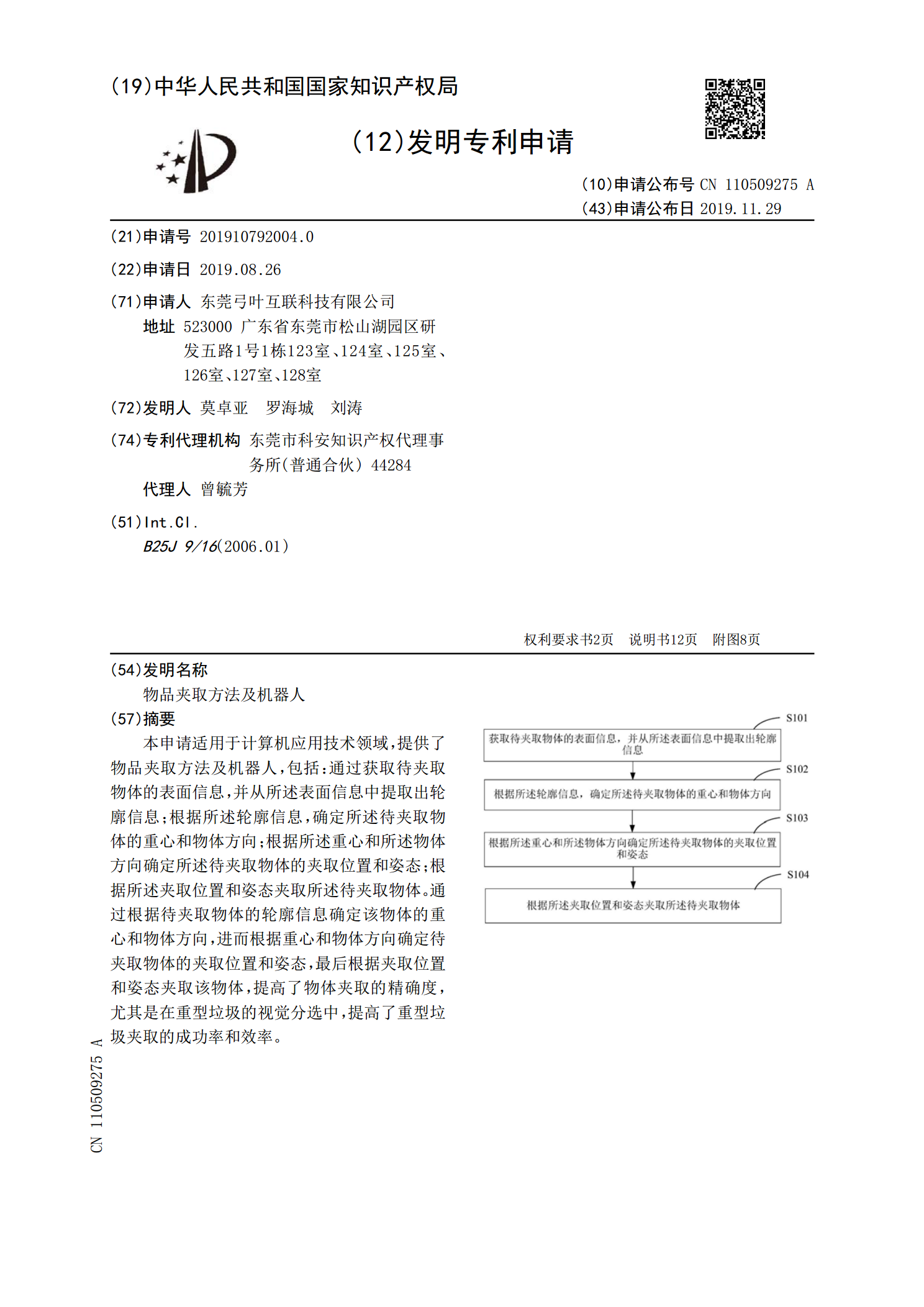
本申请适用于计算机应用技术领域,提供了物品夹取方法及机器人,包括:通过获取待夹取物体的表面信息,并从所述表面信息中提取出轮廓信息;根据所述轮廓信息,确定所述待夹取物体的重心和物体方向;根据所述重心和所述物体方向确定所述待夹取物体的夹取位置和姿态;根据所述夹取位置和姿态夹取所述待夹取物体。通过根据待夹取物体的轮廓信息确定该物体的重心和物体方向,进而根据重心和物体方向确定待夹取物体的夹取位置和姿态,最后根据夹取位置和姿态夹取该物体,提高了物体夹取的精确度,尤其是在重型垃圾的视觉分选中,提高了重型垃圾夹取的成功

基于机器视觉提高移动机器人装夹精度的应用研究.docx
基于机器视觉提高移动机器人装夹精度的应用研究基于机器视觉提高移动机器人装夹精度的应用研究摘要:移动机器人在工业自动化领域中扮演着重要的角色,但是由于各种因素的影响,如传感器的误差、环境变化等,移动机器人在装夹过程中往往难以达到高精度要求。本文提出了一种基于机器视觉的方法来提高移动机器人装夹精度。该方法主要包括对目标物体的识别与定位、装夹过程中的姿态调整和力控制等几个关键步骤。实验结果表明,该方法可以显著提高移动机器人的装夹精度,提高工作效率和产品质量。关键词:移动机器人;机器视觉;装夹精度;目标物体识别与

基于双目视觉的护理机器人抱取功能的实现的任务书.docx
基于双目视觉的护理机器人抱取功能的实现的任务书任务书任务目标:本项目旨在开发一款基于双目视觉技术的护理机器人,实现护理机器人的抱取功能,以满足日常生活中老人、残障人士和病人的抱取需求。研究内容:1.设计并开发基于双目视觉的护理机器人抱取功能:设计自动控制系统,开发机器人软硬件系统,以实现护理机器人自主识别、抱取、放置等功能。2.设计双目视觉抱取功能算法:研究双目视觉抱取功能算法,包括目标检测、物体特征提取、机械臂轨迹规划等技术,确保机器人在抱取物体时准确、稳定和安全。3.实验验证:通过实验验证双目视觉抱取