
蛇形臂机器人视觉定位导航技术研究.pptx

快乐****蜜蜂


1/10
2/10

3/10
4/10
5/10

6/10
7/10

8/10
9/10
10/10
亲,该文档总共26页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料
蛇形臂机器人视觉定位导航技术研究.pptx
汇报人:目录PARTONEPARTTWO蛇形臂机器人的定义和特点蛇形臂机器人在应用领域的重要性蛇形臂机器人的研究现状和发展趋势PARTTHREE视觉定位技术的基本原理导航技术的基本原理视觉定位与导航技术的结合方式PARTFOUR系统总体设计硬件选型与设计软件算法设计与实现系统测试与验证PARTFIVE实验设置与数据采集数据分析方法与处理流程实验结果展示与讨论结果比较与分析PARTSIX研究成果总结创新点与贡献未来研究方向与展望THANKYOU

蛇形臂机器人视觉定位导航技术研究的中期报告.docx
蛇形臂机器人视觉定位导航技术研究的中期报告一、研究背景蛇形臂机器人是一种新型的柔性臂机器人,具有灵活多变的运动方式和适应性强的特点,因此在许多领域都有广泛的应用前景。但是由于其结构复杂,传统的运动控制方式难以实现对其精准的控制和定位,因此需要引入先进的视觉定位导航技术。二、研究内容本文以蛇形臂机器人为研究对象,探讨了基于视觉定位导航技术的运动控制方法。具体内容如下:1.蛇形臂机器人的运动模型分析。2.视觉定位导航技术的原理及应用范围。3.基于OpenCV的图像处理与分析算法设计。4.基于Kalman滤波的

基于视觉导航及定位的地面移动机器人对接技术研究.docx
基于视觉导航及定位的地面移动机器人对接技术研究随着机器人技术的不断发展,地面移动机器人在各种应用场景中的使用越来越广泛,如工业生产、清洁服务、安防巡检等。在这些应用场景中,机器人需要能够在环境中自主导航定位并执行任务。因此,基于视觉导航及定位的地面移动机器人对接技术已经成为一个非常重要的研究方向。本文将围绕基于视觉导航及定位的地面移动机器人对接技术展开讨论。首先,我们将介绍相关的技术背景并提出该技术的研究意义。接着,我们将阐述该技术的应用场景以及研究现状。在此基础上,我们将深入探讨基于视觉导航及定位的地面
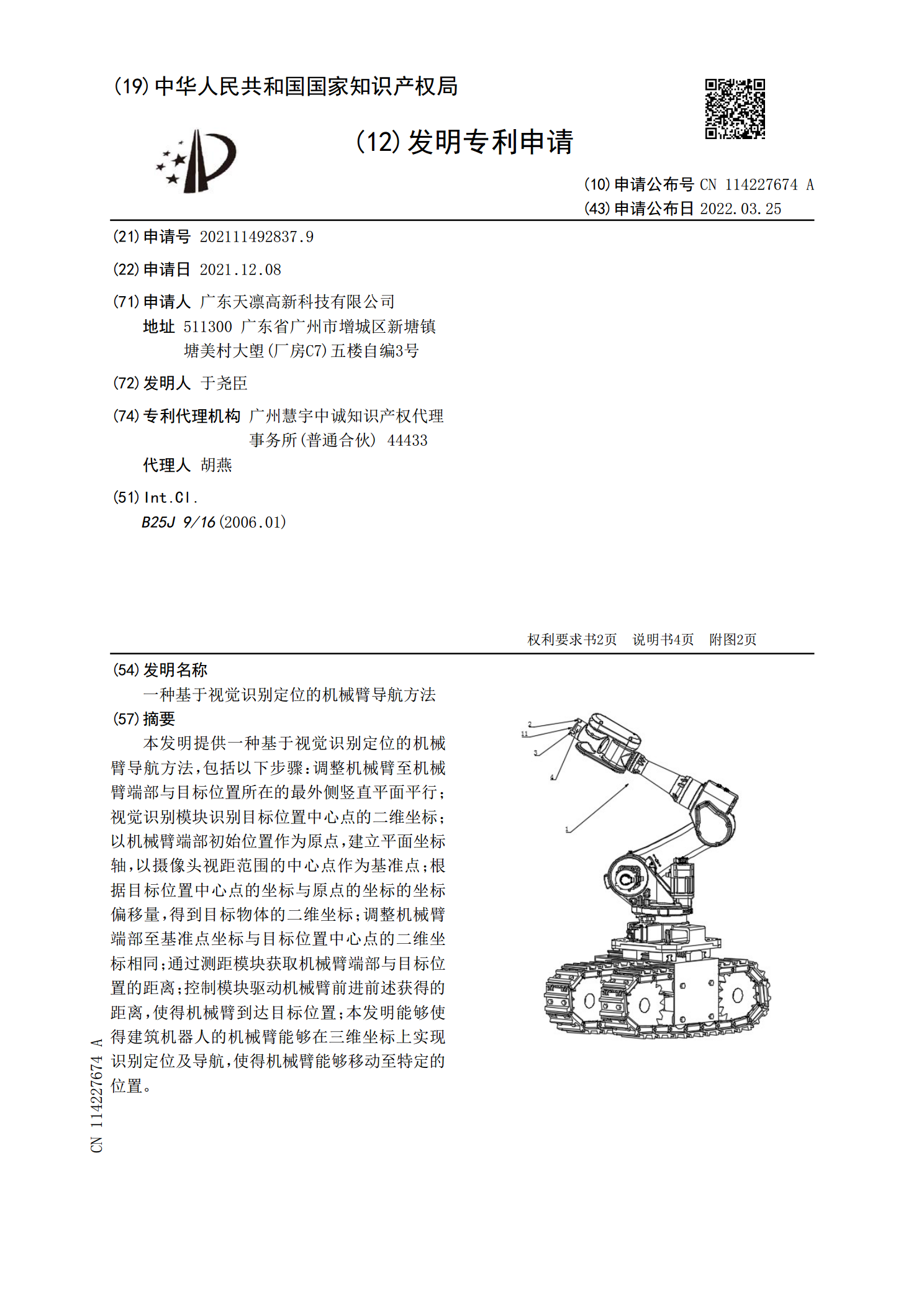
一种基于视觉识别定位的机械臂导航方法.pdf
本发明提供一种基于视觉识别定位的机械臂导航方法,包括以下步骤:调整机械臂至机械臂端部与目标位置所在的最外侧竖直平面平行;视觉识别模块识别目标位置中心点的二维坐标;以机械臂端部初始位置作为原点,建立平面坐标轴,以摄像头视距范围的中心点作为基准点;根据目标位置中心点的坐标与原点的坐标的坐标偏移量,得到目标物体的二维坐标;调整机械臂端部至基准点坐标与目标位置中心点的二维坐标相同;通过测距模块获取机械臂端部与目标位置的距离;控制模块驱动机械臂前进前述获得的距离,使得机械臂到达目标位置;本发明能够使得建筑机器人的机

农业机器人视觉定位导航技术的研究.pptx
农业机器人视觉定位导航技术的研究目录添加章节标题农业机器人视觉定位导航技术概述什么是农业机器人视觉定位导航技术农业机器人视觉定位导航技术的发展历程农业机器人视觉定位导航技术的应用场景农业机器人视觉定位导航技术的意义与价值农业机器人视觉定位导航技术的研究现状国内外研究现状及发展趋势现有研究成果及存在的问题研究重点与难点研究方法与技术路线农业机器人视觉定位导航技术实验研究实验设备与平台介绍数据采集与处理方法实验结果与分析实验结论与亮点农业机器人视觉定位导航技术应用研究应用场景的选择与描述应用技术的实现与优化应