
微型计算机控制技术于海生版课后答案.pptx

lj****88

1/10

2/10
3/10
4/10
5/10
6/10
7/10

8/10
9/10
10/10
亲,该文档总共50页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料

微型计算机控制技术于海生版课后答案.pptx
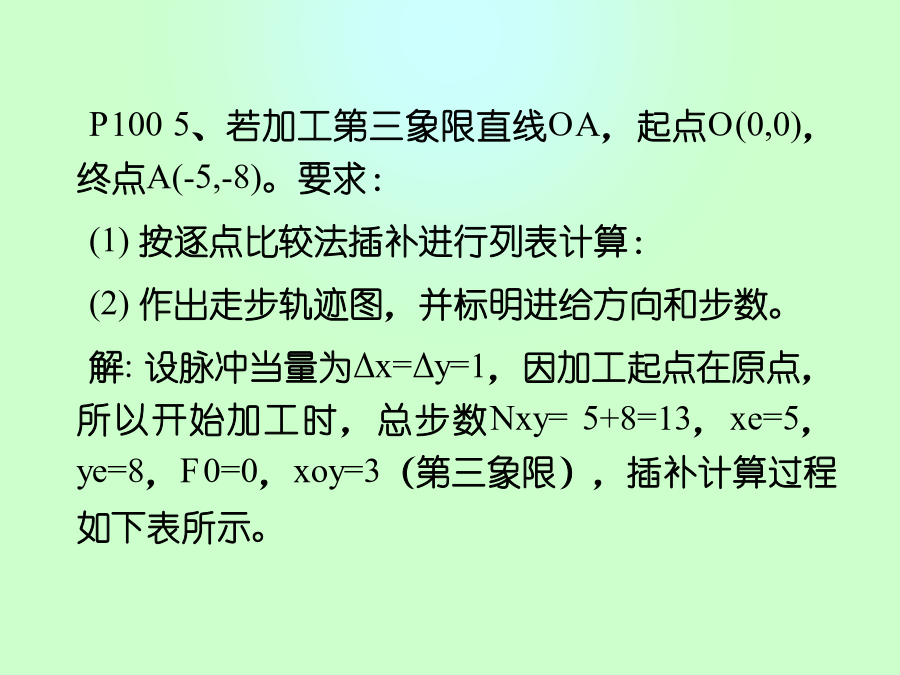
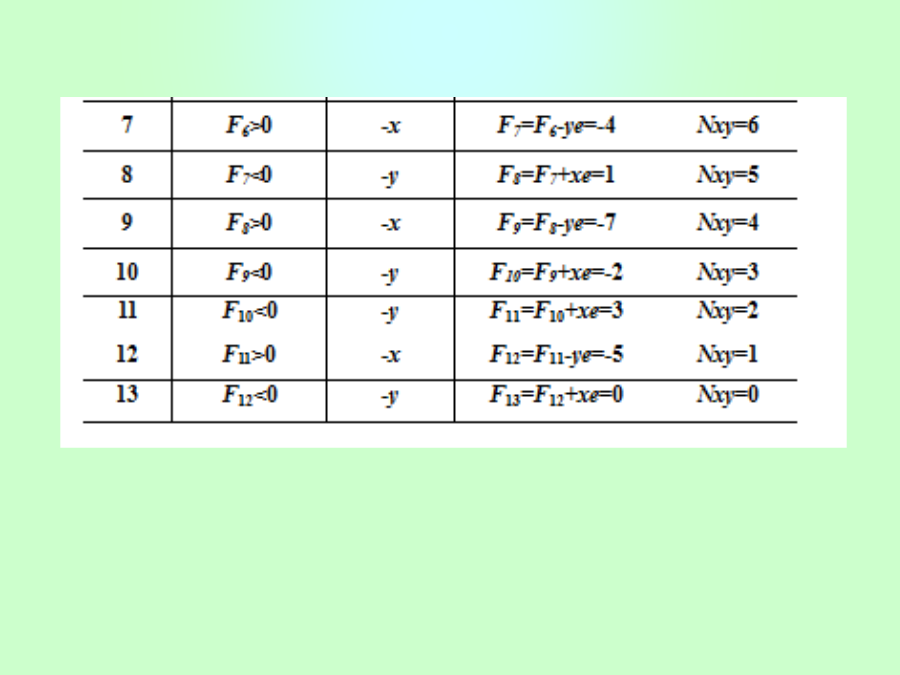
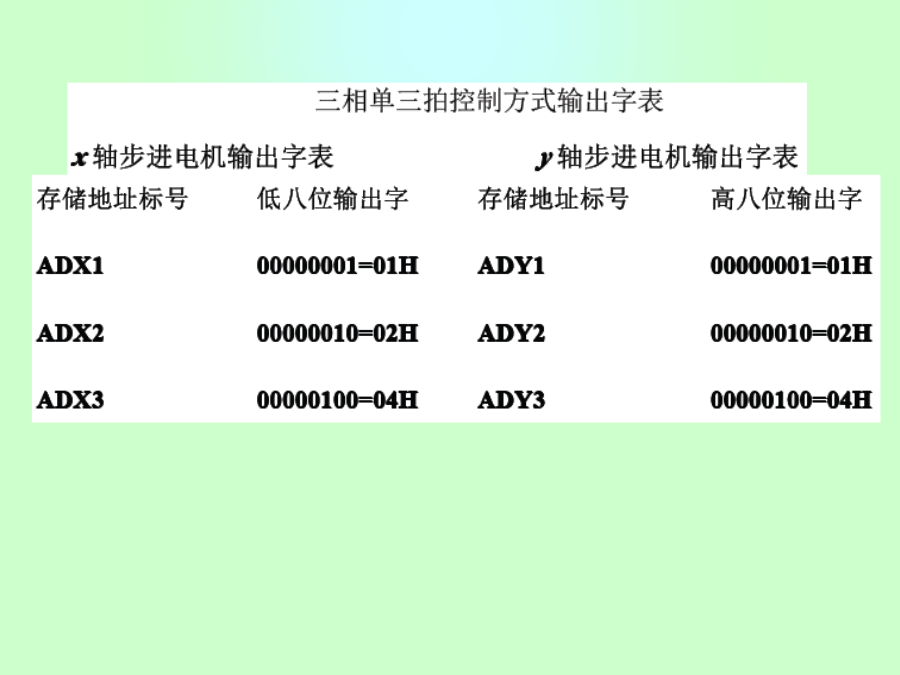
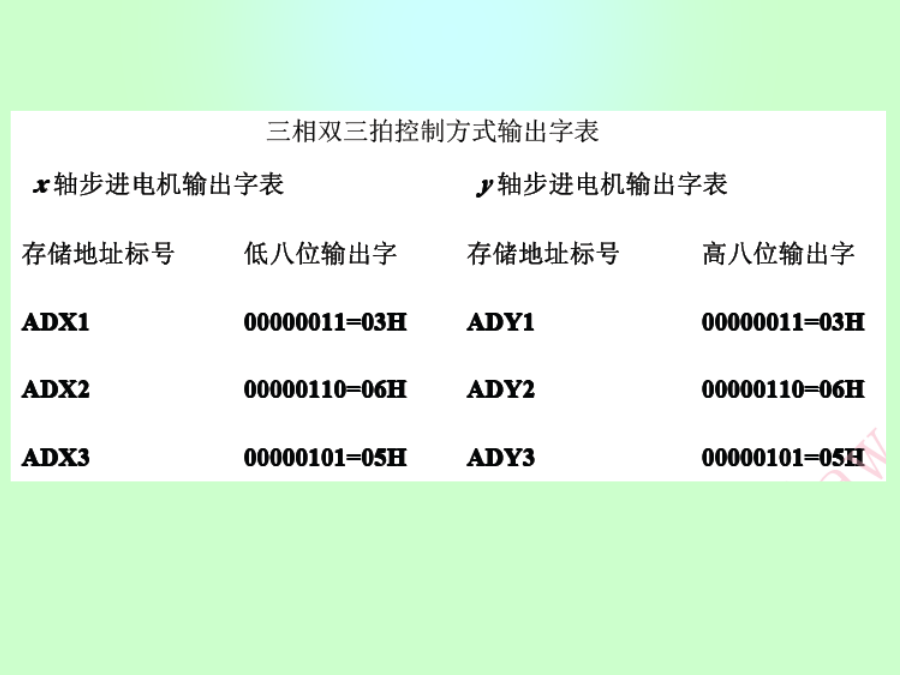
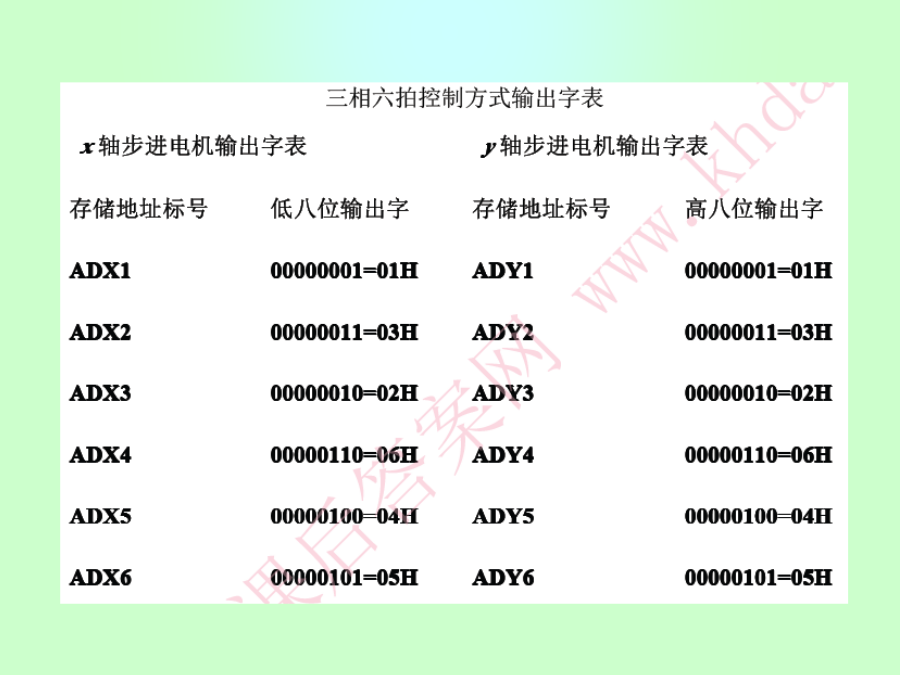
P1005、若加工第三象限直线OA,起点O(0,0),终点A(-5,-8)。要求:(1)按逐点比较法插补进行列表计算:(2)作出走步轨迹图,并标明进给方向和步数。解:设脉冲当量为Δx=Δy=1,因加工起点在原点,所以开始加工时,总步数Nxy=5+8=13,xe=5,ye=8,F0=0,xoy=3(第三象限),插补计算过程如下表所示。8.采用8255A作为x轴步进电机和y轴步进电机的控制接口,要求(1)画出接口电路原理图;(2)分别列出x轴和y轴步进电机在三相单三拍、三相双三拍和三相六拍工作方式下的输出字表
微型计算机控制技术于海生版课后答案.pdf

《微型计算机控制技术》于海生版课后答案.pdf

微型计算机控制技术(于海生版)课后答案.ppt
P1005、若加工第三象限直线OA,起点O(0,0),终点A(-5,-8)。要求:(1)按逐点比较法插补进行列表计算:(2)作出走步轨迹图,并标明进给方向和步数。解:设脉冲当量为Δx=Δy=1,因加工起点在原点,所以开始加工时,总步数Nxy=5+8=13,xe=5,ye=8,F0=0,xoy=3(第三象限),插补计算过程如下表所示。8.采用8255A作为x轴步进电机和y轴步进电机的控制接口,要求(1)画出接口电路原理图;(2)分别列出x轴和y轴步进电机在三相单三拍、三相双三拍和三相六拍工作方式下的输出字表

微型计算机控制技术(于海生版)课后答案-PPT.ppt
P1005、若加工第三象限直线OA,起点O(0,0),终点A(-5,-8)。要求:(1)按逐点比较法插补进行列表计算:(2)作出走步轨迹图,并标明进给方向和步数。解:设脉冲当量为Δx=Δy=1,因加工起点在原点,所以开始加工时,总步数Nxy=5+8=13,xe=5,ye=8,F0=0,xoy=3(第三象限),插补计算过程如下表所示。8.采用8255A作为x轴步进电机和y轴步进电机的控制接口,要求(1)画出接口电路原理图;(2)分别列出x轴和y轴步进电机在三相单三拍、三相双三拍和三相六拍工作方式下的输出字表