
基于四连杆机构的轮式跳跃机构.pdf

明轩****la


1/9

2/9

3/9

4/9

5/9

6/9

7/9

8/9

9/9
在线预览结束,喜欢就下载吧,查找使用更方便
相关资料
基于四连杆机构的轮式跳跃机构.pdf
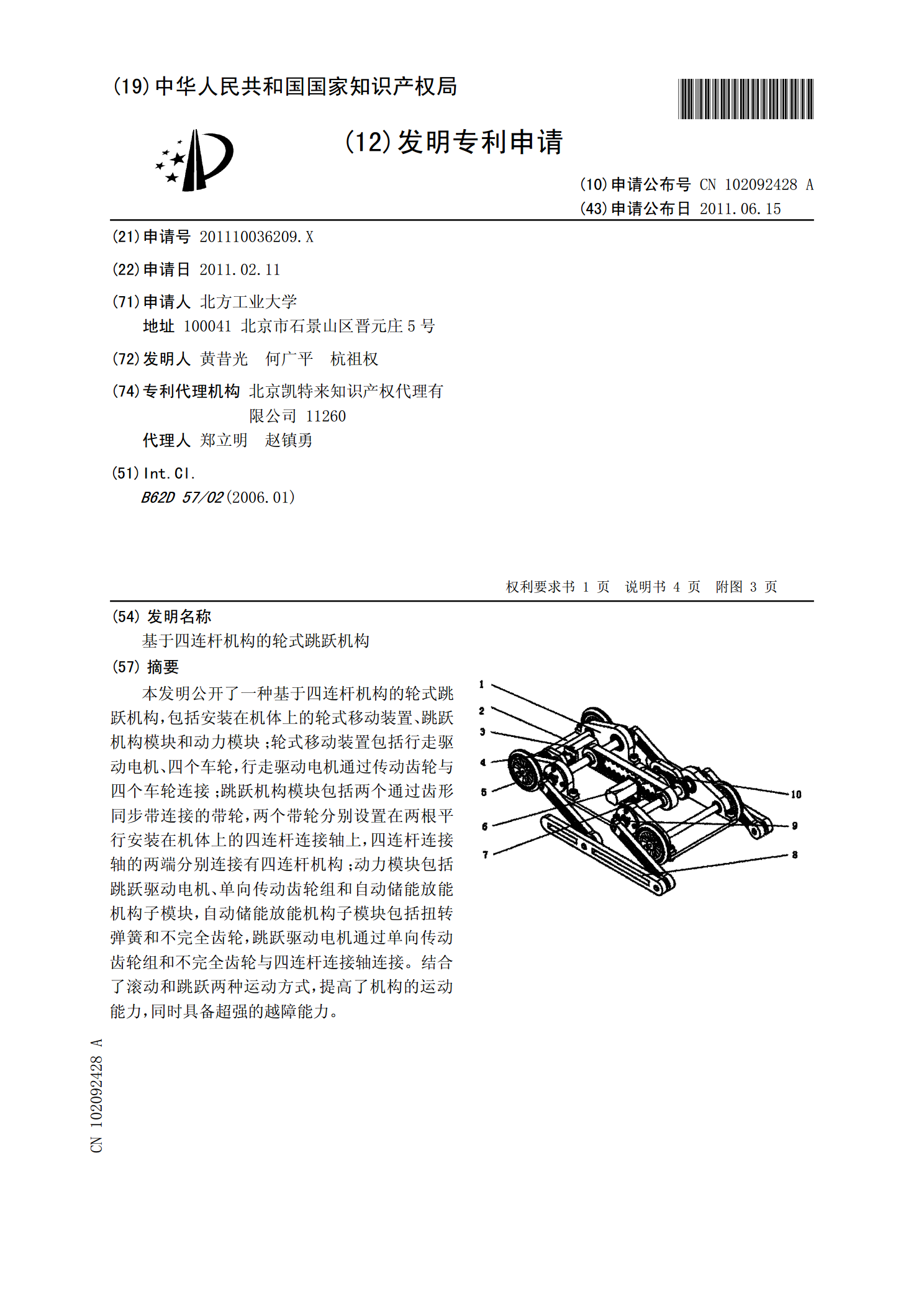
本发明公开了一种基于四连杆机构的轮式跳跃机构,包括安装在机体上的轮式移动装置、跳跃机构模块和动力模块;轮式移动装置包括行走驱动电机、四个车轮,行走驱动电机通过传动齿轮与四个车轮连接;跳跃机构模块包括两个通过齿形同步带连接的带轮,两个带轮分别设置在两根平行安装在机体上的四连杆连接轴上,四连杆连接轴的两端分别连接有四连杆机构;动力模块包括跳跃驱动电机、单向传动齿轮组和自动储能放能机构子模块,自动储能放能机构子模块包括扭转弹簧和不完全齿轮,跳跃驱动电机通过单向传动齿轮组和不完全齿轮与四连杆连接轴连接。结合了滚动

基于连杆机构的仿生跳跃机器人.pdf
本发明涉及一种基于连杆机构的仿生跳跃机器人,其特征在于:该机器人具体结构包括:(a)机体,由两片近似梯形的四边形镂空金属板组成,用于固定安装机器人的其他部件;(b)履带行进模块:主要包括:两个减震销,一对减震弹簧,三对履带轮;(c)跳跃机构模块:主要包括:大腿、小腿、脚掌、脚连杆,小腿连杆;(d)动力模块:动力模块可分为两个子模块,即单向传动齿轮组和自动储能放能机构子模块。本发明机器人一方面能越过较高的障碍和跳上较高的台阶;另一方面摈弃了单纯地、完全地模仿理念。机器人的跳跃方式与方便快捷、地形适应性强的机

用于轮式装载机的改进的反转连杆机构.pdf
本发明涉及一种用于轮式装载机的改进的反转连杆机构,所述轮式装载机用于操纵机具例如铲斗或货盘叉,所述反转连杆机构可包括枢转地连接在机器的端部框架与机具之间的提升臂、枢转地连接在机具与倾斜杠杆之间的倾斜连杆,所述倾斜杠杆枢转地连接在倾斜连杆与提升臂之间。提升缸可使提升臂旋转以升降机具,并且倾斜缸可驱动倾斜杠杆和倾斜连杆以使机具在倾倒位置与收起位置之间旋转。这些运动元件的长度的比率设置成使得对一个机具例如铲斗而言的良好性能不会导致对于另一机具例如货盘叉的不良性能。

基于matlab的连杆机构设计.doc
目录1平面连杆机构的运动分析…………………………………………………………………………11.2机构的工作原理……………………………………………………………………………………11.3机构的数学模型的建立……………………………………………………………………………11.3.1建立机构的闭环矢量位置方程...................................................11.3.2求解方法...............................................

基于matlab的连杆机构设计.doc
目录1平面连杆机构的运动分析…………………………………………………………………………11.2机构的工作原理……………………………………………………………………………………11。3机构的数学模型的建立……………………………………………………………………………11.3.1建立机构的闭环矢量位置方程.。。。。。。.。..。。。。。。.。。。。。。。。。。.。.。。。。。。.。。.。。。。。。。。。。11。3。2求解方法。。。.。。。。.。。。...。。.。.。。.。。。。。。。..。。。。...。.。。。。..