
基于固定双目视觉的移动机器人避障方法研究的中期报告.docx

快乐****蜜蜂


1/2

2/2
在线预览结束,喜欢就下载吧,查找使用更方便
相关资料

基于固定双目视觉的移动机器人避障方法研究的中期报告.docx
基于固定双目视觉的移动机器人避障方法研究的中期报告摘要:避障是移动机器人的基本功能之一,对于实现机器人的自主导航和路径规划等任务具有重要意义。本研究基于固定双目视觉的移动机器人避障方法,使用两个固定在机器人上方的相机来获取环境信息,通过对图像进行处理和分析,实现机器人的避障功能。本文对该方法的理论基础、系统设计和实验结果进行了详细介绍。关键词:移动机器人;双目视觉;避障;环境感知一、引言随着移动机器人技术的快速发展,机器人在实现自主导航、路径规划等任务方面的应用越来越广泛。而机器人的避障功能是机器人能够自

基于双目视觉的智能小车避障方法研究.docx
基于双目视觉的智能小车避障方法研究目录一、内容描述................................................21.研究背景与意义........................................32.国内外研究现状........................................43.研究内容与方法........................................5二、双目视觉系统原理及关键技术................
基于双目视觉的避障技术方法.pdf
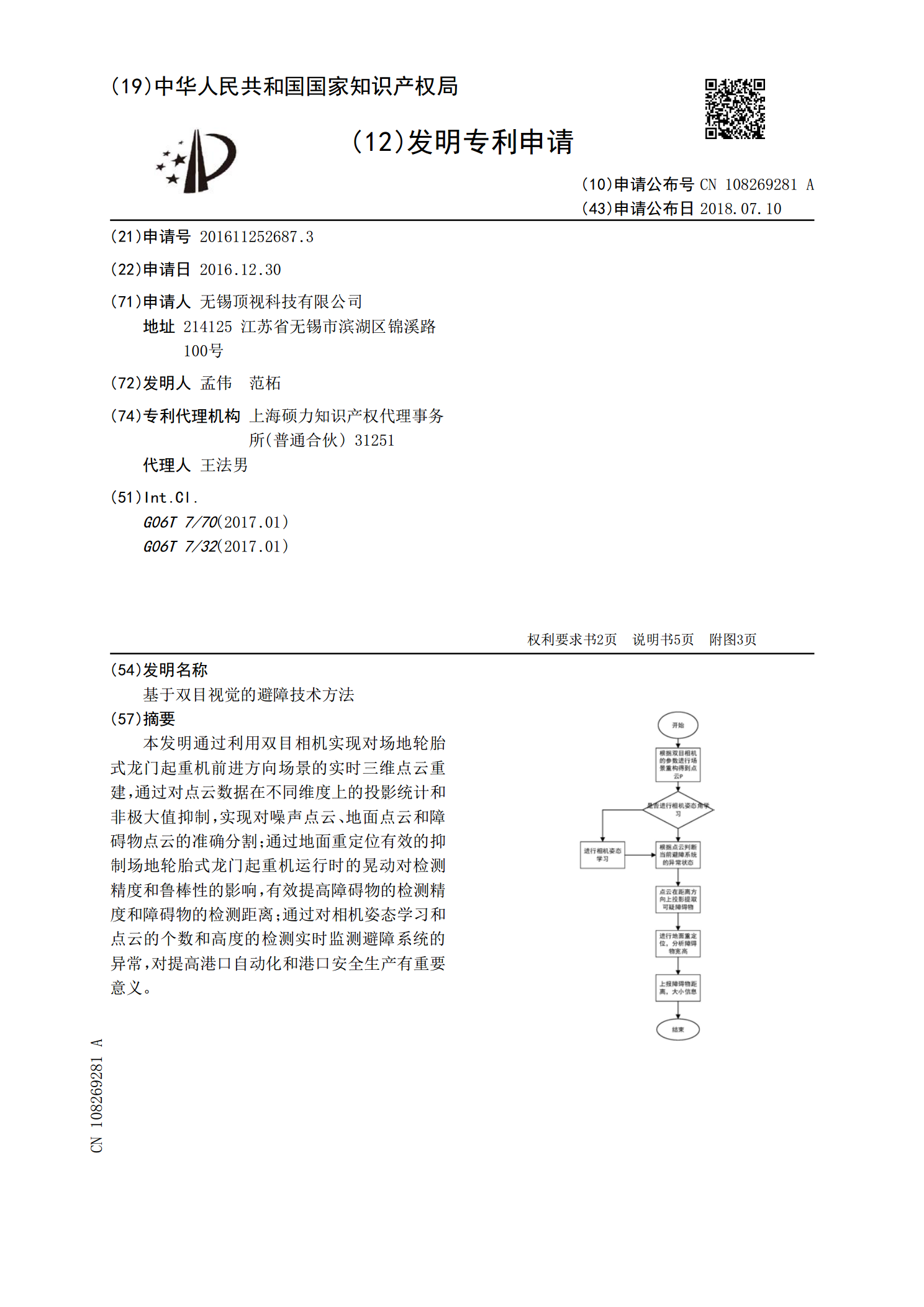
本发明通过利用双目相机实现对场地轮胎式龙门起重机前进方向场景的实时三维点云重建,通过对点云数据在不同维度上的投影统计和非极大值抑制,实现对噪声点云、地面点云和障碍物点云的准确分割;通过地面重定位有效的抑制场地轮胎式龙门起重机运行时的晃动对检测精度和鲁棒性的影响,有效提高障碍物的检测精度和障碍物的检测距离;通过对相机姿态学习和点云的个数和高度的检测实时监测避障系统的异常,对提高港口自动化和港口安全生产有重要意义。

基于双目视觉的服务机器人避障方法研究的开题报告.docx
基于双目视觉的服务机器人避障方法研究的开题报告一、研究背景随着服务机器人在日常生活中的广泛应用,其避障能力成为了必要的功能之一。而基于单目视觉的避障方法因为难以获取深度信息,其准确度不尽人意,因此双目视觉的避障方法成为了一个备受关注的研究方向。双目视觉是指通过两个摄像头获取场景的深度信息,从而实现三维视觉的过程。利用双目视觉的深度信息,可以对机器人周围的障碍物进行准确的探测和避障,提高了机器人在复杂环境下的自主导航能力。二、研究意义双目视觉的避障方法具有以下优点:1.可以获取精确的深度信息,提高了避障的准

基于双目立体视觉技术的无人船避障研究.docx
基于双目立体视觉技术的无人船避障研究基于双目立体视觉技术的无人船避障研究摘要:无人船作为一种具有广泛应用前景的无人自动驾驶航行器,受到了越来越多的关注。然而,在实际航行过程中,无人船常常面临避障问题。本文通过采用双目立体视觉技术,实现无人船的避障功能。通过对无人船的外部环境进行感知和分析,通过双目立体视觉技术获取深度信息,从而能够及时准确地判断障碍物的位置和形状,进而做出相应的避障策略。实验结果表明,基于双目立体视觉技术的无人船避障系统能够有效地提高无人船的安全性和良好的航行性能。关键词:双目立体视觉、无