
袋装物料搬运机器人动力学研究的综述报告.docx

快乐****蜜蜂


1/2

2/2
在线预览结束,喜欢就下载吧,查找使用更方便
相关资料

袋装物料搬运机器人动力学研究的综述报告.docx
袋装物料搬运机器人动力学研究的综述报告搬运机器人已经成为物流和制造行业中不可或缺的工具。袋装物料搬运机器人在这些行业中广泛应用,因为它们可以快速、精确地搬运和堆放袋装物料。为了实现这个目标,袋装物料搬运机器人需要设计得具有强大的动力学性能。因此,本文将介绍袋装物料搬运机器人动力学研究的综述报告。袋装物料搬运机器人的运动学和动力学是理解其性能的关键。运动学处理如何描述和分析机器人的运动,包括路径、速度和加速度。而动力学则处理机器人的力、力矩和精确的控制系统以实现运动学的目标。袋装物料搬运机器人的动力学性能与

智能物料搬运机器人的设计与研究.docx
智能物料搬运机器人的设计与研究一、综述随着科技的飞速发展,智能物料搬运机器人在工业生产中的应用越来越广泛。智能物料搬运机器人是一种能够自动完成物料搬运任务的机器人,它可以根据预先设定的路径和目标点,实现对物料的精确搬运。本文将对智能物料搬运机器人的设计与研究进行综述,以期为相关领域的研究者提供一些有益的参考。智能物料搬运机器人的研究始于20世纪70年代,当时主要关注于机器人的运动学、动力学和控制技术。随着计算机技术、传感器技术和人工智能技术的发展,智能物料搬运机器人的研究逐渐涉及到机器人视觉、路径规划、人

物料搬运关节型机器人的设计与研究的中期报告.docx
物料搬运关节型机器人的设计与研究的中期报告一、研究目的本研究的目的是设计一种适用于工业物料搬运的关节型机器人,具有良好的运动性能和灵活性,可通过远程控制实现自主操作。二、研究内容1.关节型机器人的设计理论和数学建模;2.机器人结构设计和关键部件选型;3.机器人动力学研究和控制系统设计;4.机器人的实验验证和性能测试。三、研究进展1.机器人的设计理论和数学建模本项目基于运动学原理和转子动力学理论,结合机器人机械结构设计,建立了关节型机器人的数学模型。该模型包括机器人的几何结构和运动学约束方程,通过求解方程组
物料搬运机器人.pdf
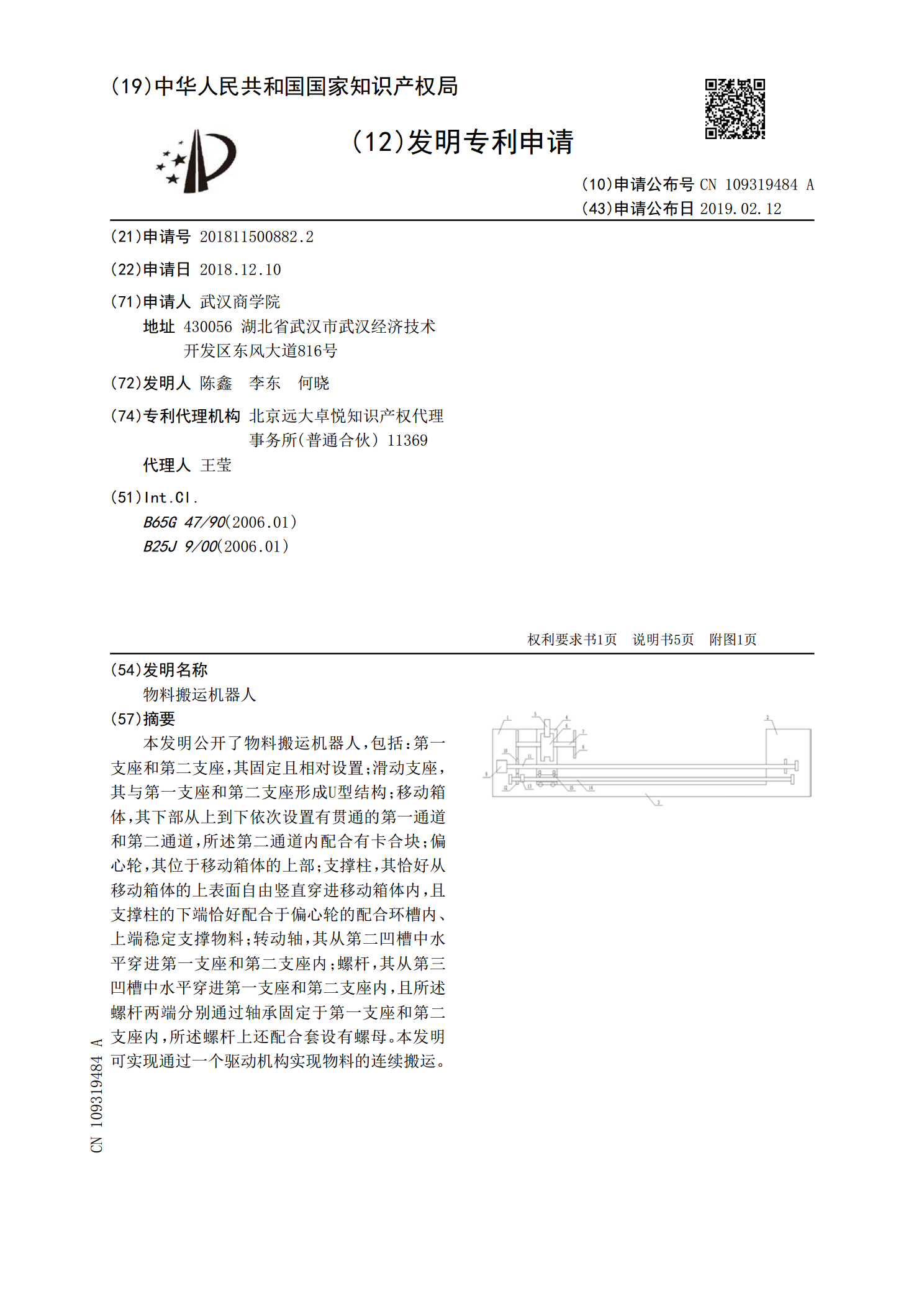
本发明公开了物料搬运机器人,包括:第一支座和第二支座,其固定且相对设置;滑动支座,其与第一支座和第二支座形成U型结构;移动箱体,其下部从上到下依次设置有贯通的第一通道和第二通道,所述第二通道内配合有卡合块;偏心轮,其位于移动箱体的上部;支撑柱,其恰好从移动箱体的上表面自由竖直穿进移动箱体内,且支撑柱的下端恰好配合于偏心轮的配合环槽内、上端稳定支撑物料;转动轴,其从第二凹槽中水平穿进第一支座和第二支座内;螺杆,其从第三凹槽中水平穿进第一支座和第二支座内,且所述螺杆两端分别通过轴承固定于第一支座和第二支座内,
一种袋装物料搬运输送装置.pdf
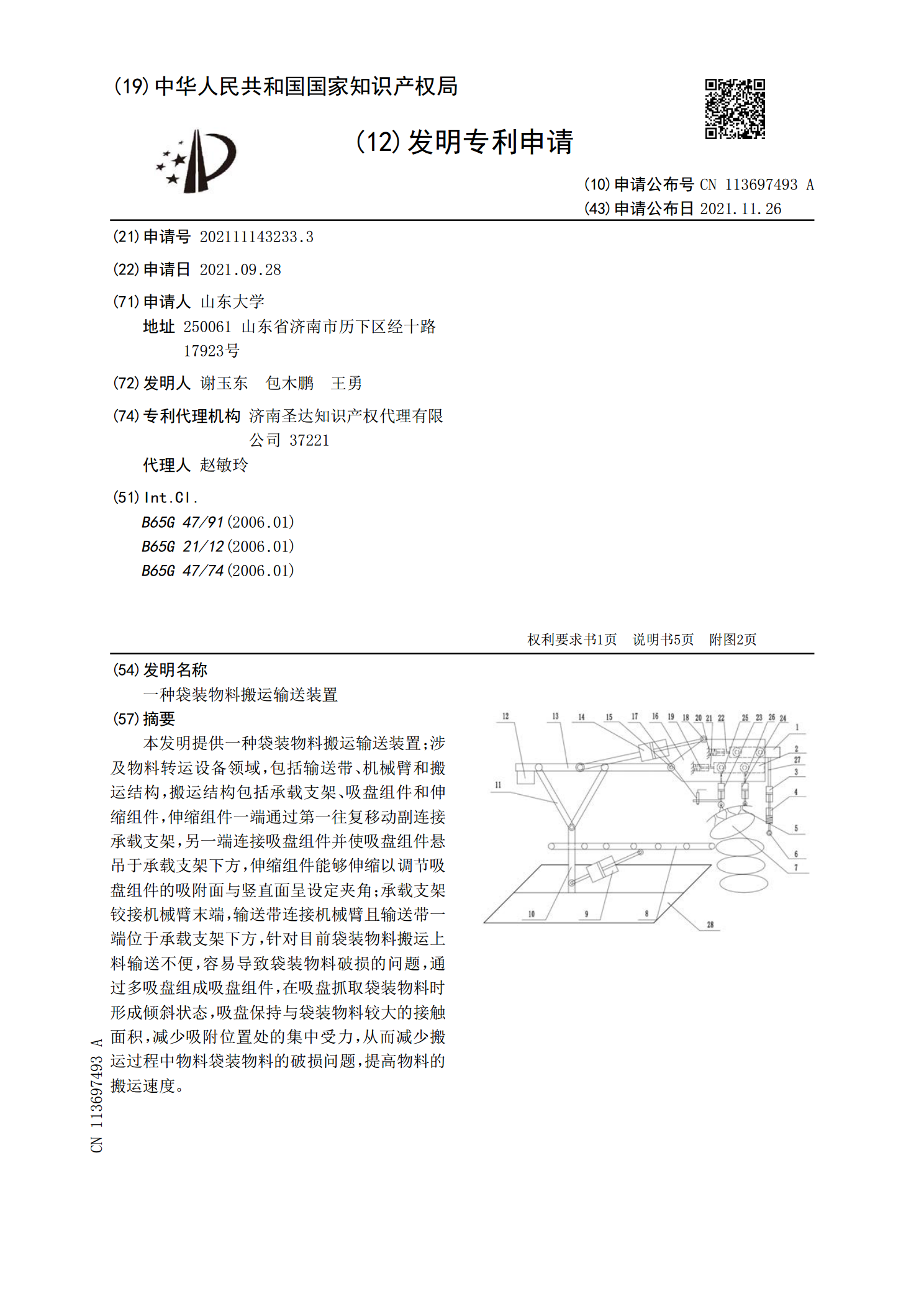
本发明提供一种袋装物料搬运输送装置;涉及物料转运设备领域,包括输送带、机械臂和搬运结构,搬运结构包括承载支架、吸盘组件和伸缩组件,伸缩组件一端通过第一往复移动副连接承载支架,另一端连接吸盘组件并使吸盘组件悬吊于承载支架下方,伸缩组件能够伸缩以调节吸盘组件的吸附面与竖直面呈设定夹角;承载支架铰接机械臂末端,输送带连接机械臂且输送带一端位于承载支架下方,针对目前袋装物料搬运上料输送不便,容易导致袋装物料破损的问题,通过多吸盘组成吸盘组件,在吸盘抓取袋装物料时形成倾斜状态,吸盘保持与袋装物料较大的接触面积,减少