
基于北斗的田间路径规划与农机作业控制方法的研究的任务书.docx

快乐****蜜蜂


1/3

2/3

3/3
在线预览结束,喜欢就下载吧,查找使用更方便
相关资料

基于北斗的田间路径规划与农机作业控制方法的研究的任务书.docx
基于北斗的田间路径规划与农机作业控制方法的研究的任务书任务书一、任务背景和目的田间路径规划与农机作业控制是现代农业生产中十分关键的技术,目的是优化耕作过程,提高土壤利用率,降低劳动力成本和环境污染。然而,传统的农机作业技术普遍存在着效率低下,土地利用率不高,操作难度大等问题。因此,研究基于北斗的田间路径规划与农机作业控制方法,就显得尤为重要。本任务的目的是将北斗技术应用到田间路径规划与农机作业控制中,以提高耕作效率和土地利用率,降低劳动力成本和环境污染。二、研究内容和技术路线1.田间路径规划算法的研究。本

基于北斗的田间路径规划与农机作业控制方法的研究的开题报告.docx
基于北斗的田间路径规划与农机作业控制方法的研究的开题报告一、研究背景及意义随着现代化农业的发展,无人机、机器人、智能化农机等高新技术的引进,农业生产进入了数字化、智能化、自动化时代。作为现代化农机重要组成部分之一的拖拉机,在推进农业现代化的进程中仍然具有不可替代的作用。随着自动化技术与农业生产的结合,拖拉机作为农业生产的主力机械,其自动化控制与智能化也成为了当今农机研究的热点之一。在拖拉机自动化控制与智能化研究中,路径规划与行驶控制被认为是实现自动化控制与智能化的重要环节。基于北斗的田间路径规划与农机作业

基于北斗定位的田间变量处方喷药控制系统的研制的任务书.docx
基于北斗定位的田间变量处方喷药控制系统的研制的任务书任务书一、项目背景随着农业生产方式的不断升级和现代化技术的应用,自动化、智能化的农业生产已成为发展的必然趋势。田间变量喷药技术是现代农业生产中的重要技术之一,能够有效减少农药的使用量,提高喷药效果。当前,传统的田间喷药方式存在着药剂使用量不均匀、耗费人力物力等问题,需要开发出一种基于北斗定位的田间变量喷药控制系统,旨在提高田间喷药的效率和精度,促进农业生产的智能化和自动化进程。二、项目目标本项目旨在开发一种基于北斗定位技术的田间变量喷药控制系统,实现以下

丘陵山地田间作业路径规划研究与试验的开题报告.docx
丘陵山地田间作业路径规划研究与试验的开题报告一、选题背景随着现代农业技术的不断提高,越来越多的农业作业机械被广泛使用,如收割机、播种机、喷洒机等。同时,农村土地的复垦和整治让丘陵山地越来越多地被利用。然而,由于丘陵山地地形复杂,路况艰难,机械化作业在这些区域常常受到很大的限制。例如,作业路径不合理导致耕作不完整、农药喷洒不到位等问题,使得作物产量无法实现最大化。因此,规划合理的田间作业路径是丘陵山地地区机械化农业发展中必须解决的重要问题。本研究致力于探究如何通过路径规划方法提高丘陵山地地区机械化作业效率,
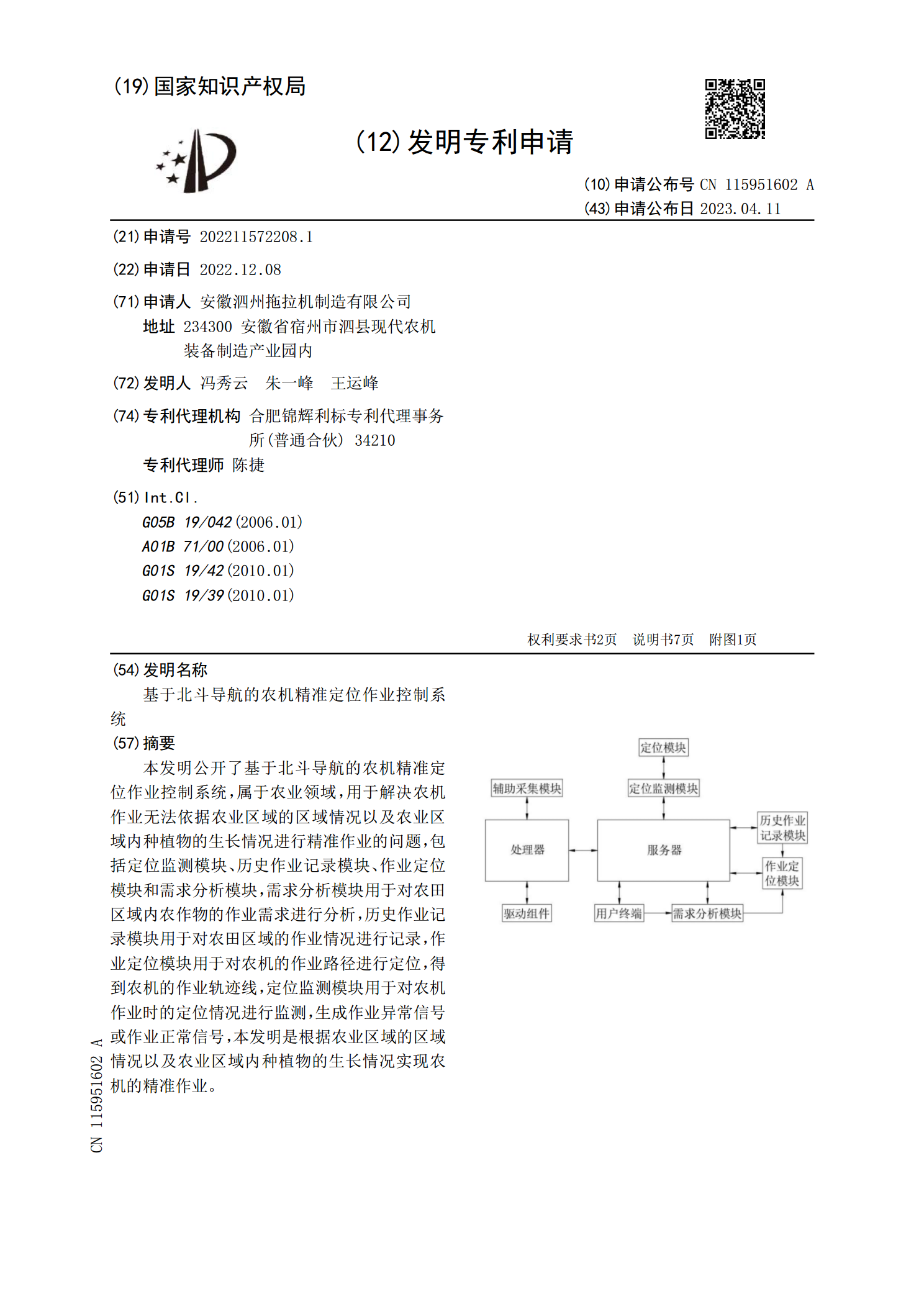
基于北斗导航的农机精准定位作业控制系统.pdf
本发明公开了基于北斗导航的农机精准定位作业控制系统,属于农业领域,用于解决农机作业无法依据农业区域的区域情况以及农业区域内种植物的生长情况进行精准作业的问题,包括定位监测模块、历史作业记录模块、作业定位模块和需求分析模块,需求分析模块用于对农田区域内农作物的作业需求进行分析,历史作业记录模块用于对农田区域的作业情况进行记录,作业定位模块用于对农机的作业路径进行定位,得到农机的作业轨迹线,定位监测模块用于对农机作业时的定位情况进行监测,生成作业异常信号或作业正常信号,本发明是根据农业区域的区域情况以及农业区