
六自由度外骨骼式上肢康复机器人设计的任务书.docx

快乐****蜜蜂


1/3

2/3

3/3
在线预览结束,喜欢就下载吧,查找使用更方便
相关资料

六自由度外骨骼式上肢康复机器人设计的任务书.docx
六自由度外骨骼式上肢康复机器人设计的任务书任务书一、任务概述随着医疗技术的进步,外骨骼机器人在康复医学领域中的应用得到了越来越多的关注。上肢康复机器人是一种六自由度的外骨骼式机器人,它可以协助患者进行上肢康复训练,帮助患者还原肌肉的功能。本项目旨在设计一款六自由度外骨骼式上肢康复机器人。二、任务要求1.设计一款六自由度外骨骼式上肢康复机器人2.机器人结构紧凑,外形美观,操作简便,安全可靠,适应不同身材的患者。3.机器人能够完成患者常见的上肢康复训练模式,包括肩部、肘部和手部的康复训练。4.机器人具有人机交
外骨骼式上肢康复机器人.pdf
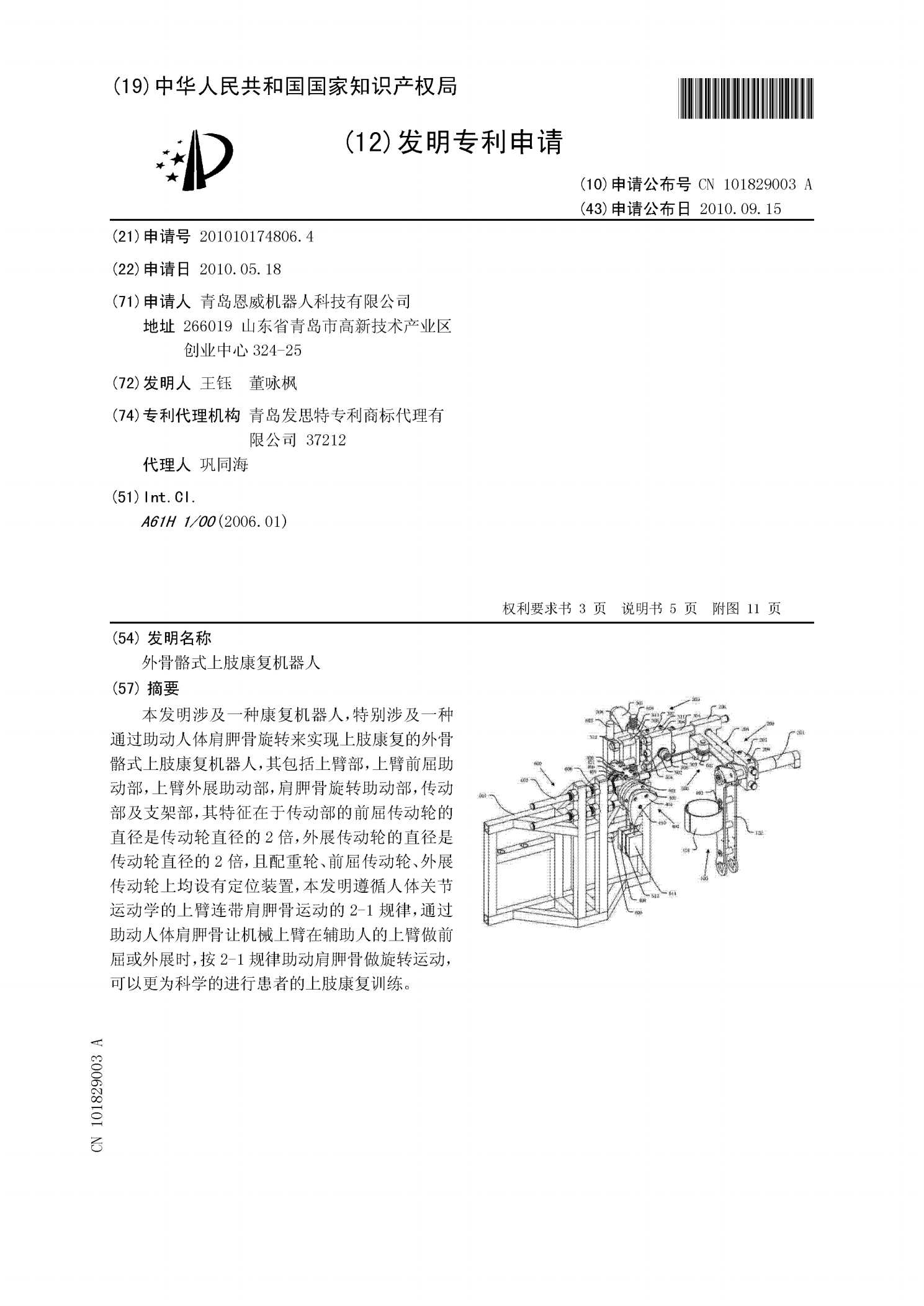
本发明涉及一种康复机器人,特别涉及一种通过助动人体肩胛骨旋转来实现上肢康复的外骨骼式上肢康复机器人,其包括上臂部,上臂前屈助动部,上臂外展助动部,肩胛骨旋转助动部,传动部及支架部,其特征在于传动部的前屈传动轮的直径是传动轮直径的2倍,外展传动轮的直径是传动轮直径的2倍,且配重轮、前屈传动轮、外展传动轮上均设有定位装置,本发明遵循人体关节运动学的上臂连带肩胛骨运动的2-1规律,通过助动人体肩胛骨让机械上臂在辅助人的上臂做前屈或外展时,按2-1规律助动肩胛骨做旋转运动,可以更为科学的进行患者的上肢康复训练。?

基于外骨骼的上肢康复机器人设计与研究的任务书.docx
基于外骨骼的上肢康复机器人设计与研究的任务书一、课题背景随着科技的不断发展,机器人技术已经成为了人们关注的热门话题。在医疗健康领域,机器人技术也得到了广泛的应用,特别是在康复治疗领域。上肢功能障碍是一种比较常见的病症,例如中风、脊髓损伤和肌肉萎缩等,这些疾病都会导致上肢肌肉无法实现自主控制,严重影响患者的日常生活和工作。为了解决这种情况,目前已经研制出了一些基于机器人技术的上肢康复机器人,通过机器人的力量辅助运动,帮助患者恢复肌肉功能。外骨骼技术是近年来应用较为广泛的机器人技术之一,其通过外部力量支持人体

基于外骨骼的上肢康复机器人设计与研究.docx
基于外骨骼的上肢康复机器人设计与研究摘要随着科技和医疗技术的不断进步,智能康复机器人成为一种越来越被广泛关注的康复技术。本文基于外骨骼的上肢康复机器人,介绍了其设计和研究,探讨了其康复效果和未来发展趋势。该机器人可以帮助患者恢复上肢的运动能力,对肢体功能康复起到重要的作用,具有广阔的应用前景。关键字:外骨骼;上肢康复机器人;设计;研究AbstractWiththecontinuousprogressoftechnologyandmedicaltechnology,Intelligentrehabilita

三自由度被动式上肢康复机器人的设计与开发的任务书.docx
三自由度被动式上肢康复机器人的设计与开发的任务书任务书:三自由度被动式上肢康复机器人的设计与开发一、项目背景随着人口老龄化的加剧,上肢功能障碍患者的数量逐渐增多,因此需要开发一种能够帮助患者进行上肢康复训练的机器人。本项目旨在设计与开发一种三自由度的被动式上肢康复机器人,以提升患者的康复效果。二、项目目标1.设计一种三自由度的上肢康复机器人,能够模拟人手的运动轨迹并提供相应的力矩支持,以实现对患者上肢关节的康复训练。2.开发一套控制系统,能够实现对机器人运动的精确控制,并根据患者的康复需求进行自适应调整。