
基于视觉导航的双行水田除草机设计与试验的开题报告.docx

快乐****蜜蜂


1/3

2/3

3/3
在线预览结束,喜欢就下载吧,查找使用更方便
相关资料

基于视觉导航的双行水田除草机设计与试验的开题报告.docx
基于视觉导航的双行水田除草机设计与试验的开题报告一、研究背景和意义随着种植业的发展,越来越多的农业机械被应用于种植业,其优势和效率越来越被农民所认可。而在水田种植中,草害和水草严重影响着水稻品质和产量。传统的除草方式主要依靠人工除草和化学除草,需要大量人力和成本,并且会对环境造成污染。因此,同时满足高效、低成本、环保的水田除草机显得尤为重要。视觉导航技术,是一种基于图像处理以及计算机视觉技术的传感器,越来越被广泛应用于水稻、小麦、玉米等农作物的无人机作业中。通过拍摄农田上方的图像,处理后可以得到关于农田环

电控式双行水田深施肥除草机设计与试验的开题报告.docx
电控式双行水田深施肥除草机设计与试验的开题报告1.研究背景我国水稻种植面积广,但传统的农业生产方式存在农药、化肥使用量大、效率低下等问题。因此,开发一种高效、环保的水稻深施肥除草机具有重要意义。电控式双行水田深施肥除草机是一种新型的农业机械设备,可以在水田深处进行施肥和除草,提高农业生产效率和质量。2.研究内容本研究旨在设计和试验一种电控式双行水田深施肥除草机,主要内容包括:(1)通过对相关文献的研究分析及现有除草机的结构参数的合理性进行理论分析,并制定设计指标;(2)设计双行水田深施肥除草机结构,包括车

遥控式双行水田行间除草机设计与试验的任务书.docx
遥控式双行水田行间除草机设计与试验的任务书任务书一、任务概述双行水田行间除草机是一种可以有效去除水稻田间杂草的农业机械设备。本任务的目标是设计并制造一种遥控式双行水田行间除草机,并进行试验验证其性能。二、任务内容1.设计遥控式双行水田行间除草机的结构和工作原理;2.进行材料选择、制造工艺设计以及制造工艺支持的设计;3.确定遥控式双行水田行间除草机的机械系统和电气系统,完成其电路设计和控制设计;4.进行机器性能试验和机械系统测试,并进行必要的改进和优化;5.根据机械系统测试结果进行控制系统优化,提高机器的效
基于自走式双行水田除草机的自动转向机构.pdf
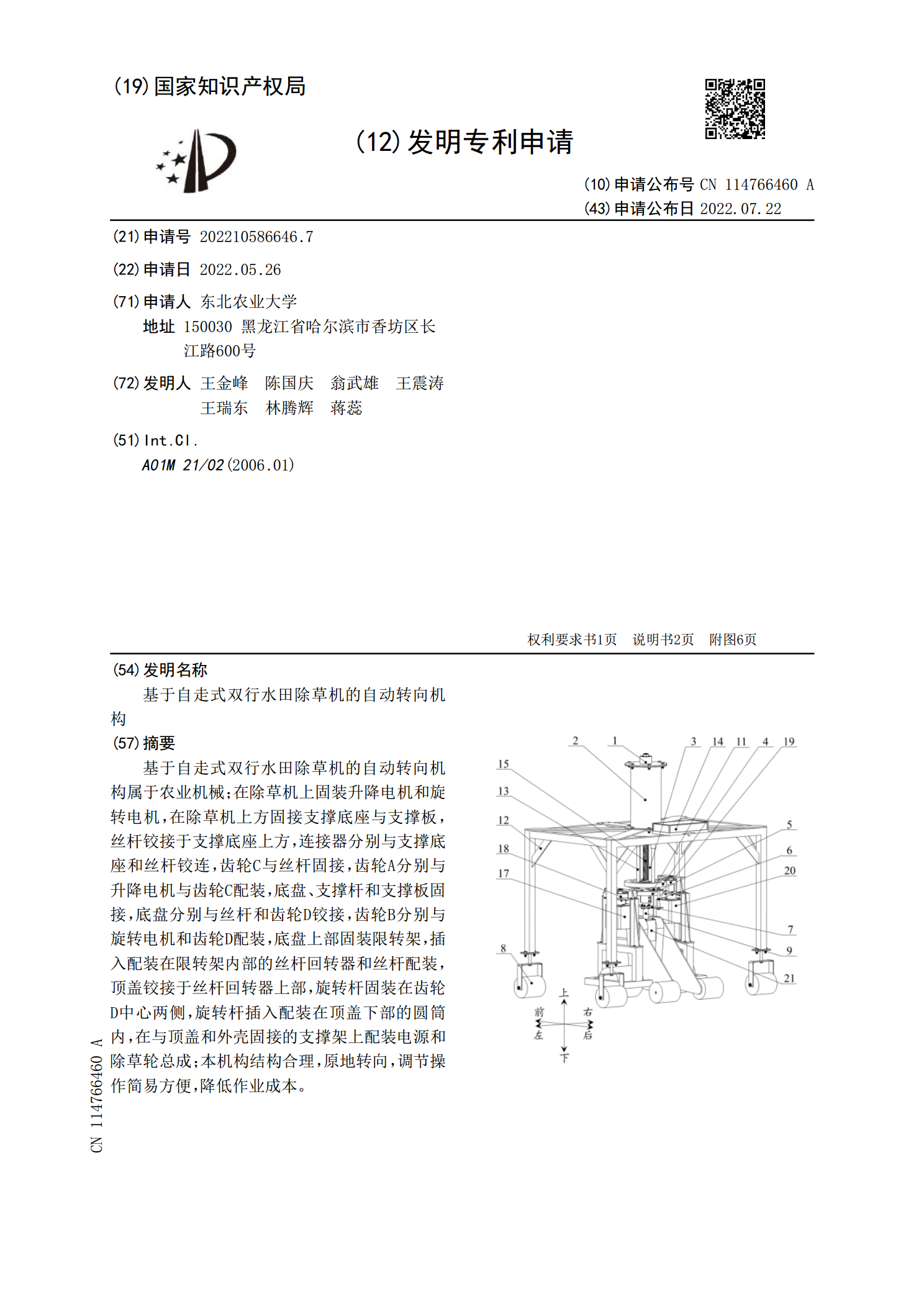
基于自走式双行水田除草机的自动转向机构属于农业机械;在除草机上固装升降电机和旋转电机,在除草机上方固接支撑底座与支撑板,丝杆铰接于支撑底座上方,连接器分别与支撑底座和丝杆铰连,齿轮C与丝杆固接,齿轮A分别与升降电机与齿轮C配装,底盘、支撑杆和支撑板固接,底盘分别与丝杆和齿轮D铰接,齿轮B分别与旋转电机和齿轮D配装,底盘上部固装限转架,插入配装在限转架内部的丝杆回转器和丝杆配装,顶盖铰接于丝杆回转器上部,旋转杆固装在齿轮D中心两侧,旋转杆插入配装在顶盖下部的圆筒内,在与顶盖和外壳固接的支撑架上配装电源和除草

基于COCM的除草机视觉定位研究的开题报告.docx
基于COCM的除草机视觉定位研究的开题报告一、选题背景和意义随着现代农业生产的发展和技术的进步,农业机械化水平不断提高,使得农业生产效率和经济效益得到了显著提高。而除草机作为现代农业机械化生产中的重要设备,可以有效地减少人工劳动力,提高除草效率,提升农业生产效益。然而目前大部分的除草机都是依靠人工操作来定位和跟踪作业区域进行除草操作,这既浪费时间也效率低下。因此,开发一种能够实现自主导航和视觉定位的除草机具有很大的实用价值。近年来,随着计算机视觉和深度学习技术的不断发展,基于图像和视频处理的机器人视觉定位