
轮撬式越障机器人设计与分析的任务书.docx

快乐****蜜蜂


1/3

2/3

3/3
在线预览结束,喜欢就下载吧,查找使用更方便
相关资料

轮撬式越障机器人设计与分析的任务书.docx
轮撬式越障机器人设计与分析的任务书任务书:轮撬式越障机器人设计与分析一、任务背景随着科技的发展和人们对生产、生活质量的追求,机器人技术已广泛应用于各个领域。其中,越障机器人在野外作业、灾难救援等领域具有广泛的应用前景。本次任务的背景即是设计和分析一款轮撬式越障机器人,以满足对野外作业的需求。二、任务目的本次任务的目的是设计和分析一款轮撬式越障机器人,其可以完成越障、导航、采集等多项功能。具体目的如下:1.设计一款轮撬式越障机器人,实现机器人的越障、导航等基本功能。2.分析机器人结构和动力学特性,优化机器人

轮腿式越障机器人.pdf
本发明提供了一种轮腿式越障机器人,属于移动机器人领域,其包括相连接的机架和轮腿机构;轮腿机构包括机架关节、机械臂转向装置、机械臂、轮体转向装置和轮体装置;机械臂转向装置与机架关节转动连接,机械臂一端与机械臂转向装置连接,另一端连接轮体转向装置,轮体装置与轮体转向装置转动连接,机械臂包括伸缩驱动装置以及能够折叠变形的四边形机构,伸缩驱动装置的固定端和伸缩端分别连接四边形机构的对角线的两端。利用机械臂转向装置能够驱动机械臂水平转动,利用轮体转向装置能够驱动轮体装置水平转动,机械臂通过其自身的伸缩驱动装置实现沿

关节式履带机器人越障性能分析.docx
关节式履带机器人越障性能分析关节式履带机器人越障性能分析摘要:随着机器人技术的不断发展,越障性能已成为判断机器人性能的重要指标之一。本文主要针对关节式履带机器人的越障性能进行了分析和讨论。文章首先介绍了关节式履带机器人的基本结构和工作原理,然后详细分析了影响机器人越障性能的关键因素,包括机器人的灵活性和稳定性、关节的运动范围和控制方式等。接着,本文提出了优化关节式履带机器人越障性能的方法和措施,包括改进机器人的关节设计、优化机器人的控制算法等。最后,通过实验验证了所提出方法的有效性,并对未来发展进行了展望

一种履带式机器人设计及其越障分析.docx
一种履带式机器人设计及其越障分析履带式机器人是一种具有履带轮的机器人,它通过履带轮的转动来实现移动和越障功能。履带式机器人设计的关键是结构设计和越障功能的分析。首先,履带式机器人的结构设计是实现其功能的基础。履带式机器人通常由车体、履带轮、履带链和电机等部分组成。车体是机器人的主体结构,承载和连接其他部件。履带轮是支撑和驱动机器人行走的关键组件,它通过电机的驱动来带动履带链的运动。履带链由一系列链接而成的链环组成,它紧贴着地面,具有良好的摩擦力和抓地力。电机是履带式机器人的动力来源,通过控制电机的转速和方
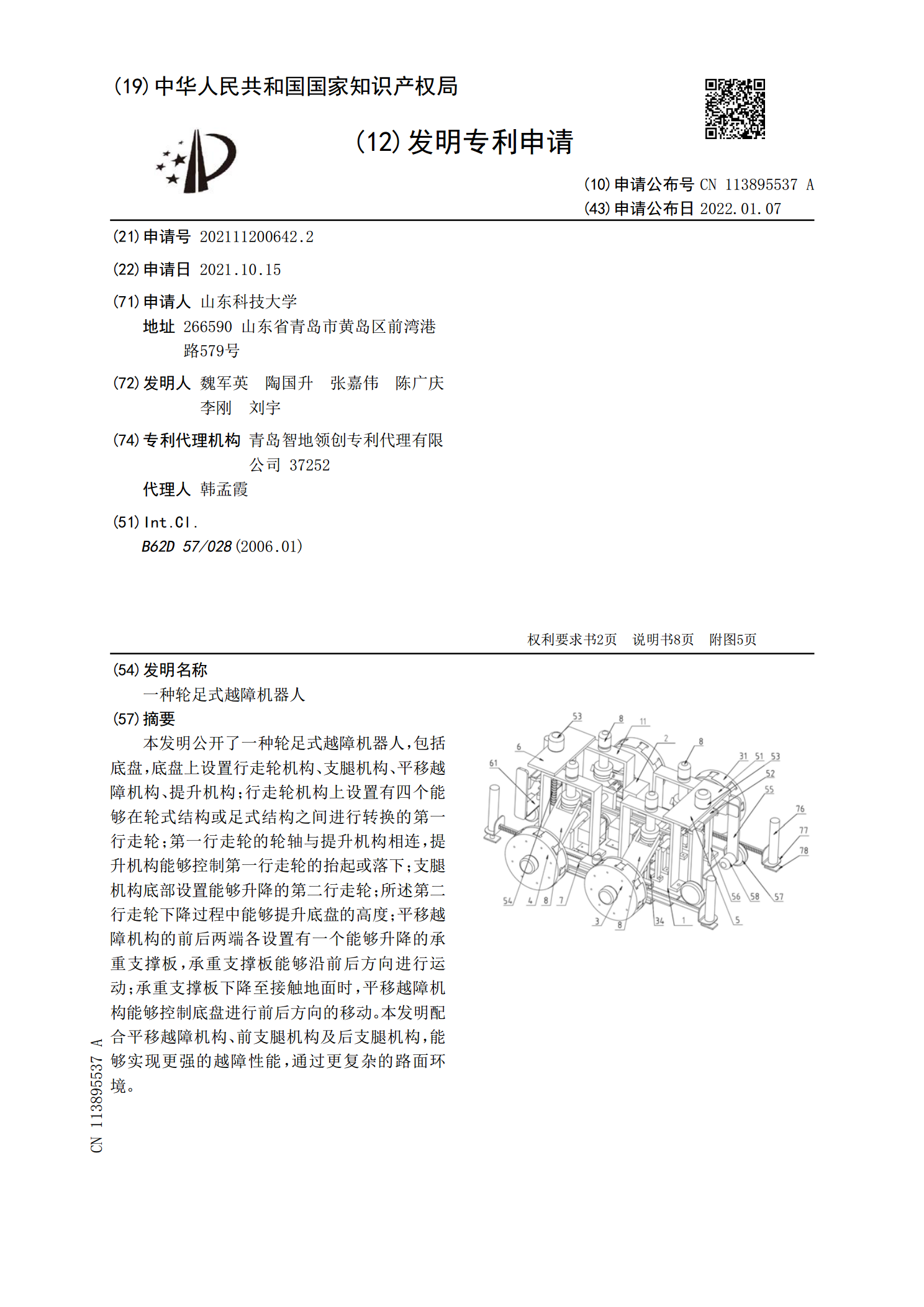
一种轮足式越障机器人.pdf
本发明公开了一种轮足式越障机器人,包括底盘,底盘上设置行走轮机构、支腿机构、平移越障机构、提升机构;行走轮机构上设置有四个能够在轮式结构或足式结构之间进行转换的第一行走轮;第一行走轮的轮轴与提升机构相连,提升机构能够控制第一行走轮的抬起或落下;支腿机构底部设置能够升降的第二行走轮;所述第二行走轮下降过程中能够提升底盘的高度;平移越障机构的前后两端各设置有一个能够升降的承重支撑板,承重支撑板能够沿前后方向进行运动;承重支撑板下降至接触地面时,平移越障机构能够控制底盘进行前后方向的移动。本发明配合平移越障机构