
微型四旋翼无人机建模与控制的任务书.docx

快乐****蜜蜂


1/3

2/3

3/3
在线预览结束,喜欢就下载吧,查找使用更方便
相关资料

微型四旋翼无人机建模与控制的任务书.docx
微型四旋翼无人机建模与控制的任务书一、任务背景随着无人机技术的迅速发展和应用,微型四旋翼无人机已经成为了新一代的重要技术装备,广泛应用于军事、民用、科研等领域。实现微型四旋翼无人机化,实现其稳定、高效、安全的飞行,是当前的重点研究难题之一。为此,本次任务旨在研究微型四旋翼无人机的建模和控制,实现其稳定的飞行控制。二、任务目的(1)研究微型四旋翼无人机的基本结构和控制原理;(2)掌握微型四旋翼无人机的建模方法和控制技术;(3)设计模拟环境,实现微型四旋翼无人机的控制算法模拟仿真;(4)验证控制算法的有效性和

微型四旋翼飞行器的建模与控制系统研究的中期报告.docx
微型四旋翼飞行器的建模与控制系统研究的中期报告一、研究内容本研究旨在实现微型四旋翼飞行器的建模与控制系统设计。具体包括以下内容:1.微型四旋翼飞行器的动力学模型2.飞行器位置控制系统的设计与实现3.飞行器姿态控制系统的设计与实现二、研究进展1.微型四旋翼飞行器的动力学模型通过对微型四旋翼飞行器的物理结构、电机等部件进行研究,建立了其动力学模型。目前,已经完成了飞行器的转动惯量和动力学方程的推导。2.飞行器位置控制系统的设计与实现基于飞行器的动力学模型,设计位置控制系统,并完成了控制器的搭建。在实验室内进行
四旋翼无人机.pdf
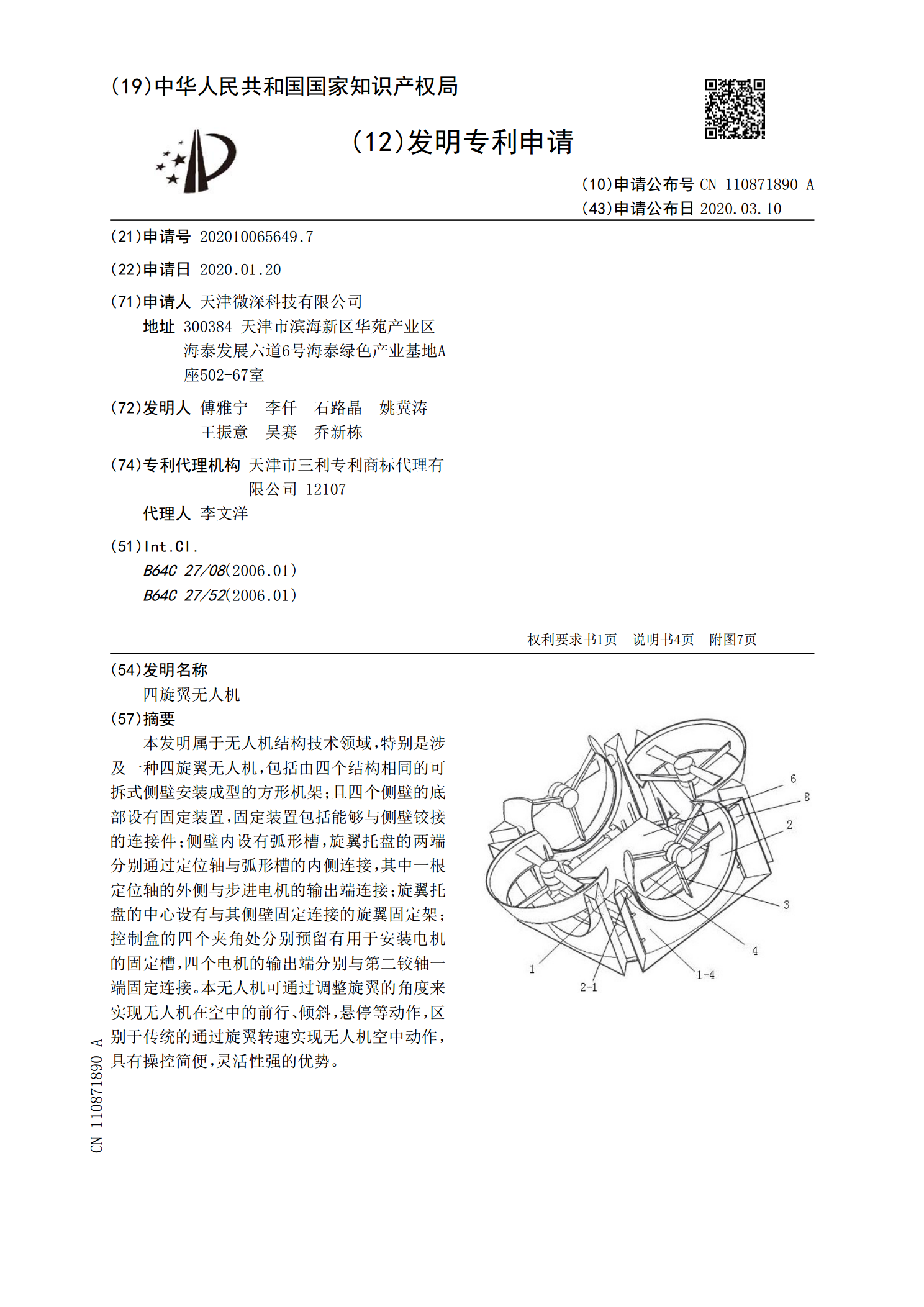
本发明属于无人机结构技术领域,特别是涉及一种四旋翼无人机,包括由四个结构相同的可拆式侧壁安装成型的方形机架;且四个侧壁的底部设有固定装置,固定装置包括能够与侧壁铰接的连接件;侧壁内设有弧形槽,旋翼托盘的两端分别通过定位轴与弧形槽的内侧连接,其中一根定位轴的外侧与步进电机的输出端连接;旋翼托盘的中心设有与其侧壁固定连接的旋翼固定架;控制盒的四个夹角处分别预留有用于安装电机的固定槽,四个电机的输出端分别与第二铰轴一端固定连接。本无人机可通过调整旋翼的角度来实现无人机在空中的前行、倾斜,悬停等动作,区别于传统的

四旋翼飞行器动力建模及方向控制研究的任务书.docx
四旋翼飞行器动力建模及方向控制研究的任务书任务书一、任务背景四旋翼飞行器因其简单、精准的控制、稳定的飞行能力和灵活的起降方式,被广泛应用于无人机、航拍和科学探测等领域。随着科技的飞速发展,飞行器市场的需求也越来越大。因此,在对四旋翼飞行器的实际应用中,深入研究其动力学模型和运动方向控制方法,有着重要意义和现实意义。二、任务目标本研究旨在建立完整的四旋翼飞行器动力学模型,探索其运动方向控制方法,并进行仿真验证,以实现对四旋翼飞行器飞行状态的控制和调整。三、研究方案1.建立四旋翼飞行器动力学模型定义四旋翼飞行

小型旋翼无人机的机动飞行控制的任务书.docx
小型旋翼无人机的机动飞行控制的任务书一、背景介绍小型旋翼无人机目前在军事和民用领域得到广泛应用,包括侦察、搜救、航拍、农业等。在这些任务中,需要对小型旋翼无人机进行精准的机动飞行控制,以确保其能够安全、高效地完成任务。因此,机动飞行控制是小型旋翼无人机的重要研究方向之一。二、任务目的本次任务的目的是了解小型旋翼无人机机动飞行控制的基本原理和方法,掌握小型旋翼无人机的机动飞行控制技术,并在实验中进行验证和应用。三、任务内容1.了解小型旋翼无人机的机动飞行控制基本原理和方法。小型旋翼无人机的机动飞行控制主要涉