
面向复杂工件的工业机器人轨迹规划方法的研究的开题报告.docx

快乐****蜜蜂


1/3

2/3

3/3
在线预览结束,喜欢就下载吧,查找使用更方便
相关资料

面向复杂工件的工业机器人轨迹规划方法的研究的开题报告.docx
面向复杂工件的工业机器人轨迹规划方法的研究的开题报告一、选题背景及意义随着工业自动化程度的不断提高,工业机器人已经成为工业生产中不可或缺的一部分。工业机器人具有高速度、高精度、高稳定性和长时间连续工作的能力,在生产过程中发挥着重要的作用。机器人轨迹规划是工业机器人的核心技术之一。良好的轨迹规划能够使机器人在复杂的工件表面上以最短的时间内完成任务,提高生产效率,降低生产成本。因此,研究面向复杂工件的工业机器人轨迹规划方法具有重要的理论和实际应用意义。二、研究目标本文旨在研究面向复杂工件的工业机器人轨迹规划方

工业机器人最优轨迹规划研究的开题报告.docx
工业机器人最优轨迹规划研究的开题报告一、研究背景随着制造业自动化程度的不断提高,工业机器人已经成为了许多生产线上必不可缺的一部分。工业机器人的贡献不仅在于降低生产成本,提高生产效率,还可以使得生产过程更加安全,可靠和精确。而作为工业机器人中的一个重要问题,轨迹规划一直以来都受到了广泛关注。轨迹规划的好坏直接关系到了机器人的运动速度、精度和对环境的适应性,因此这一问题的研究具有非常重要的实际意义。二、研究内容本论文旨在研究工业机器人在运动轨迹规划方面的优化方法。具体研究内容包括:1.对工业机器人的运动学进行
基于径向偏置的机器人堆焊复杂外形工件的轨迹规划方法.pdf
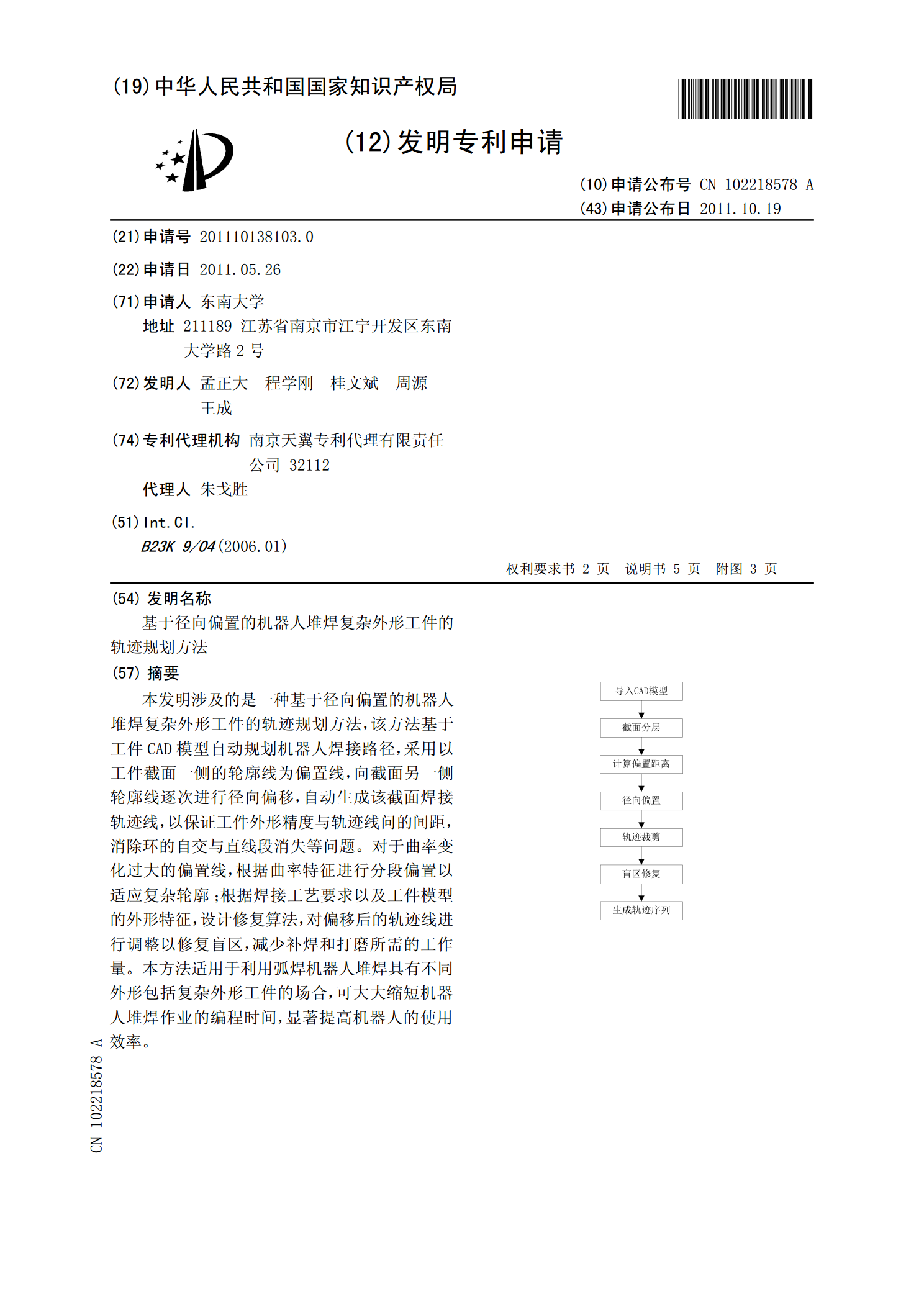
本发明涉及的是一种基于径向偏置的机器人堆焊复杂外形工件的轨迹规划方法,该方法基于工件CAD模型自动规划机器人焊接路径,采用以工件截面一侧的轮廓线为偏置线,向截面另一侧轮廓线逐次进行径向偏移,自动生成该截面焊接轨迹线,以保证工件外形精度与轨迹线问的间距,消除环的自交与直线段消失等问题。对于曲率变化过大的偏置线,根据曲率特征进行分段偏置以适应复杂轮廓;根据焊接工艺要求以及工件模型的外形特征,设计修复算法,对偏移后的轨迹线进行调整以修复盲区,减少补焊和打磨所需的工作量。本方法适用于利用弧焊机器人堆焊具有不同外形

6-DOF工业机器人轨迹规划及控制方法研究的开题报告.docx
6-DOF工业机器人轨迹规划及控制方法研究的开题报告一、研究背景目前,工业机器人在制造业中起着至关重要的作用。它们能够实现重复性高、速度快的生产动作,并大大提高了生产效率。而机器人的轨迹规划及控制方法是影响机器人动作精度和工作效率的重要因素之一。在机器人坐标系中,机器人运动轨迹是由多个连续运动的路径点组成的,因此,如何在规定的时间内完成给定的轨迹,以及如何使机器人运动精度达到最佳,成为机器人轨迹规划及控制方法研究的重要问题。二、研究内容本文主要研究6-DOF工业机器人轨迹规划及控制方法。具体包括以下内容:

面向复杂形体表面操作的工业机器人路径规划与仿真研究的开题报告.docx
面向复杂形体表面操作的工业机器人路径规划与仿真研究的开题报告一、研究背景和意义随着科技的不断进步和应用广泛,机器人技术已成为现代制造业中必不可少的一种手段与工具。其中,工业机器人技术尤为重要,作为现代制造业的主要力量之一,工业机器人一直扮演着生产自动化和提高生产效率的重要角色。机器人路径规划是机器人技术的核心问题之一,是机器人自动化操作中不可或缺的技术环节。机器人路径规划技术的发展可以极大地提高机器人的精度和效率,降低生产成本。目前,大多数工业机器人的操作都是在简单的形体结构下进行的,而在实际生产中,往往