
机器人回填式搅拌摩擦点焊系统设计的开题报告.docx

快乐****蜜蜂


1/3

2/3

3/3
在线预览结束,喜欢就下载吧,查找使用更方便
相关资料

机器人回填式搅拌摩擦点焊系统设计的开题报告.docx
机器人回填式搅拌摩擦点焊系统设计的开题报告一、选题背景分析在制造业中,焊接是一项非常重要的工艺。传统的焊接方式有许多,如手工焊接、自动焊接、点焊、摩擦焊等等。在焊接质量、效率、环保等方面,摩擦焊优于传统焊接方式,成为了未来焊接行业的趋势。目前,机器人焊接技术已越来越得到广泛应用,因为机器人焊接技术的出现,提高了焊接的效率和精度,并能有效减少人工操作的错误。但是,目前机器人焊接还存在一些问题,如常规机器人焊接通常采用线性移动,而造成的焊接质量不统一、焊接点不可控等问题,为此,本项目将研究机器人回填式搅拌摩擦

回填式搅拌摩擦点焊数值模拟的研究现状.pptx
汇报人:目录PARTONEPARTTWO回填式搅拌摩擦点焊技术原理回填式搅拌摩擦点焊技术应用领域回填式搅拌摩擦点焊技术发展历程PARTTHREE有限元分析法有限差分法边界元法离散元法PARTFOUR数值模拟研究进展数值模拟研究存在的问题与挑战数值模拟研究的发展趋势与展望PARTFIVE在新材料研发中的应用前景在优化焊接工艺中的应用前景在提高焊接质量中的应用前景在拓展应用领域中的应用前景PARTSIX结论建议THANKYOU
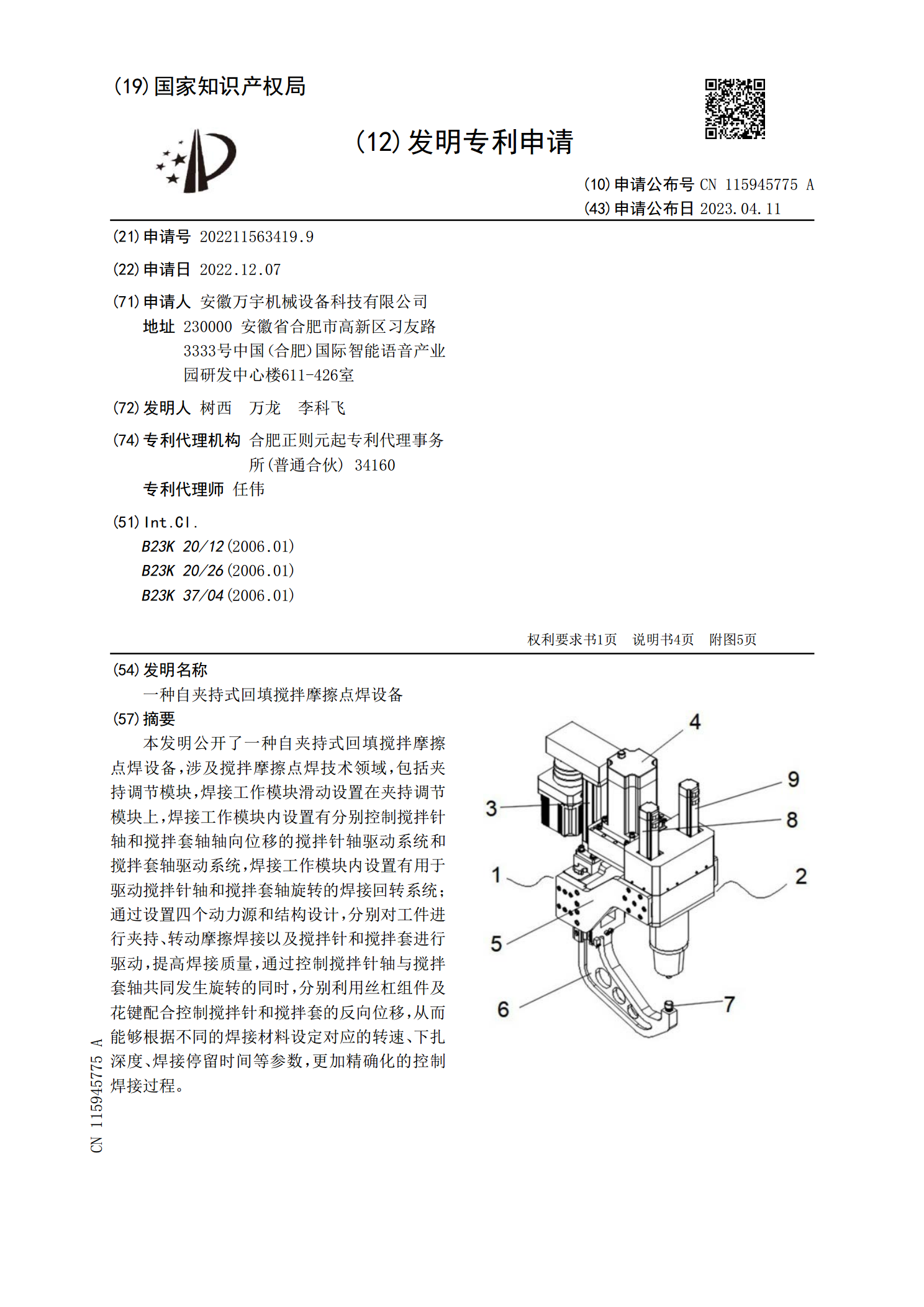
一种自夹持式回填搅拌摩擦点焊设备.pdf
本发明公开了一种自夹持式回填搅拌摩擦点焊设备,涉及搅拌摩擦点焊技术领域,包括夹持调节模块,焊接工作模块滑动设置在夹持调节模块上,焊接工作模块内设置有分别控制搅拌针轴和搅拌套轴轴向位移的搅拌针轴驱动系统和搅拌套轴驱动系统,焊接工作模块内设置有用于驱动搅拌针轴和搅拌套轴旋转的焊接回转系统;通过设置四个动力源和结构设计,分别对工件进行夹持、转动摩擦焊接以及搅拌针和搅拌套进行驱动,提高焊接质量,通过控制搅拌针轴与搅拌套轴共同发生旋转的同时,分别利用丝杠组件及花键配合控制搅拌针和搅拌套的反向位移,从而能够根据不同的

6061铝合金CFRP回填式搅拌摩擦点焊工艺和接头性能研究的开题报告.docx
6061铝合金CFRP回填式搅拌摩擦点焊工艺和接头性能研究的开题报告一、选题背景随着航空航天、汽车、船舶等行业的快速发展,要求材料具有高强度、高刚度、低密度、耐腐蚀、抗疲劳等优异性能。而6061铝合金是一种常用的结构材料,具有优良的加工性、强度和耐腐蚀性能。CFRP(CarbonFiberReinforcedPolymer)是一种轻质高强度且具有良好耐腐蚀性的复合材料,广泛应用于空中、陆地和水上交通工具及结构中。因此,研究6061铝合金与CFRP的组合材料的连接技术和性能具有广阔的应用前景和理论意义。搅拌
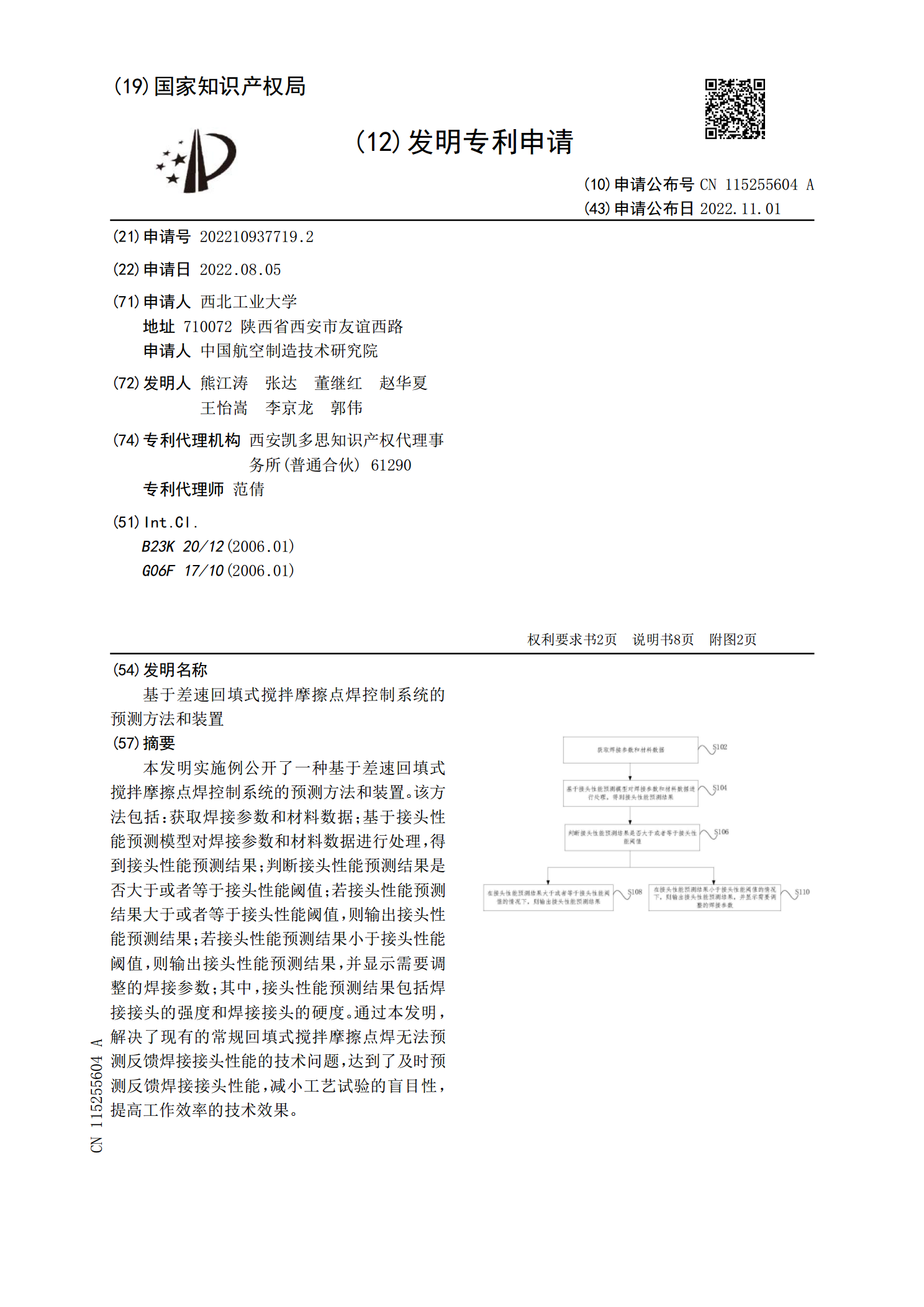
基于差速回填式搅拌摩擦点焊控制系统的预测方法和装置.pdf
本发明实施例公开了一种基于差速回填式搅拌摩擦点焊控制系统的预测方法和装置。该方法包括:获取焊接参数和材料数据;基于接头性能预测模型对焊接参数和材料数据进行处理,得到接头性能预测结果;判断接头性能预测结果是否大于或者等于接头性能阈值;若接头性能预测结果大于或者等于接头性能阈值,则输出接头性能预测结果;若接头性能预测结果小于接头性能阈值,则输出接头性能预测结果,并显示需要调整的焊接参数;其中,接头性能预测结果包括焊接接头的强度和焊接接头的硬度。通过本发明,解决了现有的常规回填式搅拌摩擦点焊无法预测反馈焊接接头