
实时前瞻的NURBS曲线插补算法研究与仿真的任务书.docx

快乐****蜜蜂


1/3

2/3

3/3
在线预览结束,喜欢就下载吧,查找使用更方便
相关资料

实时前瞻的NURBS曲线插补算法研究与仿真的任务书.docx
实时前瞻的NURBS曲线插补算法研究与仿真的任务书任务书项目名称:实时前瞻的NURBS曲线插补算法研究与仿真任务目的:本项目旨在研究实时前瞻的NURBS曲线插补算法,并基于此算法开发一款实用的轨迹规划与插补系统,以满足高精度数控机床加工的需求。任务内容:1.NURBS曲线基础理论研究通过深入学习NURBS曲线的基础理论知识,掌握NURBS曲线的基本定义、表示方法、性质等内容,为后续研究实时前瞻的插补算法奠定基础。2.实时前瞻的NURBS曲线插补算法研究基于NURBS曲线的基础理论,研究实时前瞻的NURBS

NURBS曲线插补的速度前瞻控制算法的研究设计.docx
NURBS曲线插补的速度前瞻控制算法的研究设计论文题目:NURBS曲线插补的速度前瞻控制算法的研究设计摘要:随着现代工业制造技术的不断发展,对于高精度曲线控制技术的需求越来越重要。在曲线插补控制中,速度前瞻控制算法能够使系统在切削力和加工效率的平衡中得到更好的控制。本文以NURBS曲线插补为基础,研究并设计了一种速度前瞻控制算法。该算法通过预测刀具在处理NURBS曲线时的前方路径,并通过控制系统的速度和位置来保持刀具在路径上的准确性。实验结果表明,所提出的算法能够有效地降低加工误差和提高系统的加工效率,具

NURBS曲线插补的速度前瞻控制算法的研究设计的任务书.docx
NURBS曲线插补的速度前瞻控制算法的研究设计的任务书任务书一、任务背景近年来,工业制造业的发展越来越重视自动化技术的应用。其中,数控机床作为先进制造工具,能够高效地完成各种加工任务。其运动控制系统是实现数控机床高效加工的关键。NURBS曲线插补作为其运动控制系统中的重要内容,在工业界得到了广泛的应用。速度前瞻控制算法是一种能够实现快速且平滑插补的方法,对于提高数控机床的精度和效率具有重要意义。因此,本文将研究设计一种基于NURBS曲线的速度前瞻控制算法。二、任务描述1.研究NURBS曲线的数学模型和插值

NURBS曲线插补的速度前瞻控制算法的研究设计的任务书.docx
NURBS曲线插补的速度前瞻控制算法的研究设计的任务书一、研究背景与意义在机器人加工、航空航天、汽车制造等领域,曲线插补技术是控制机器人、数控加工中心工作的重要技术,其主要作用是将设计出来的CAD模型转化为工件坐标系下的运动轨迹,以达到机器人的精准控制及高效生产。目前,NURBS曲线广泛应用于曲线插补方面,由于其插值性和近似性能极佳,尤其适合于高精度曲面或曲线的描述。但是,NURBS曲线的速度规划较为困难,且速度调节精度较低,制约了其在实际应用中的推广与应用。基于以上问题,本研究旨在设计一种NURBS曲线
基于NURBS曲线插补算法的冗余机械臂实时前瞻轨迹规划方法.pdf
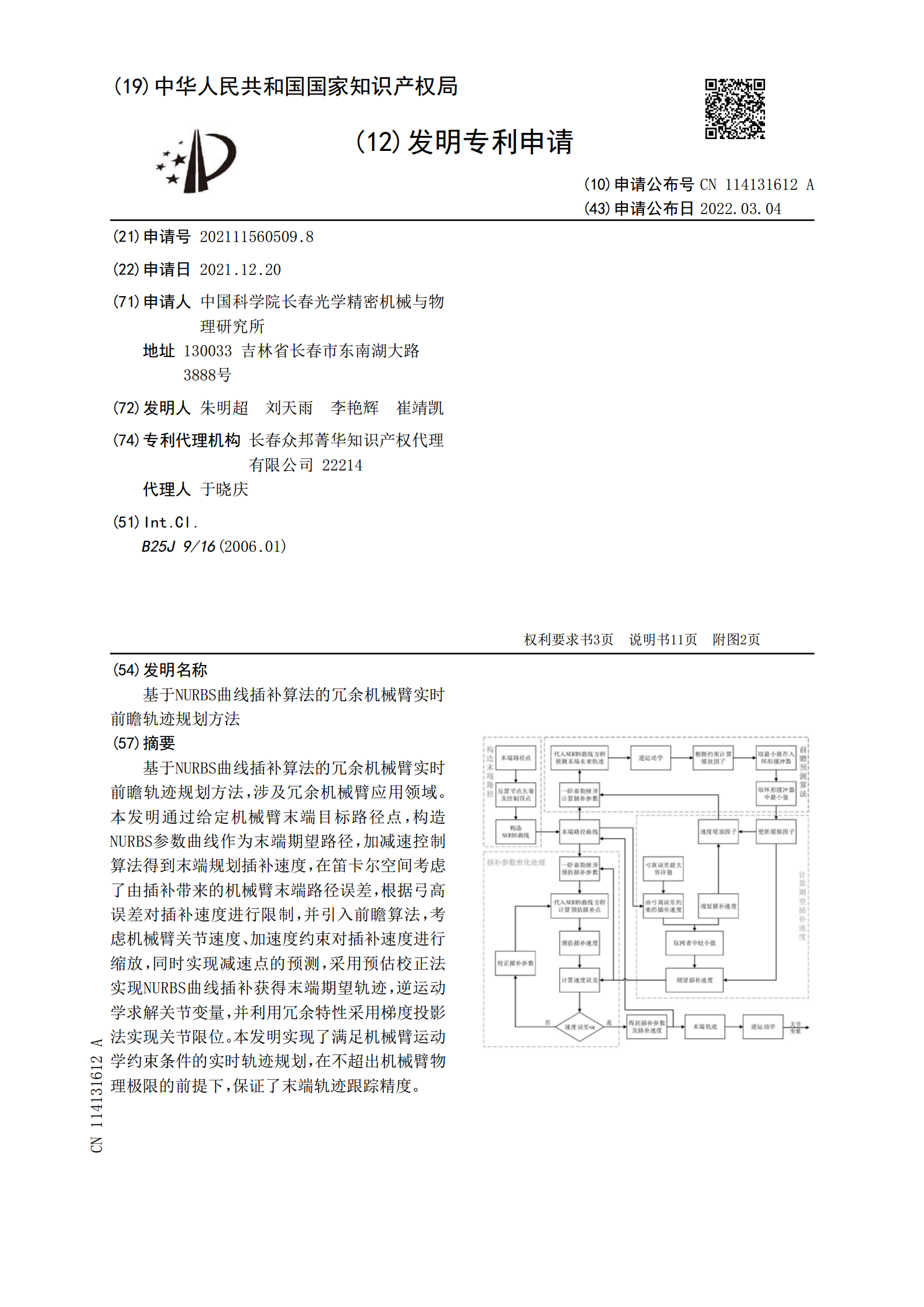
基于NURBS曲线插补算法的冗余机械臂实时前瞻轨迹规划方法,涉及冗余机械臂应用领域。本发明通过给定机械臂末端目标路径点,构造NURBS参数曲线作为末端期望路径,加减速控制算法得到末端规划插补速度,在笛卡尔空间考虑了由插补带来的机械臂末端路径误差,根据弓高误差对插补速度进行限制,并引入前瞻算法,考虑机械臂关节速度、加速度约束对插补速度进行缩放,同时实现减速点的预测,采用预估校正法实现NURBS曲线插补获得末端期望轨迹,逆运动学求解关节变量,并利用冗余特性采用梯度投影法实现关节限位。本发明实现了满足机械臂运动