
双目立体视觉 综述.ppt

yy****24


1/10

2/10

3/10

4/10

5/10
6/10

7/10

8/10
9/10

10/10
亲,该文档总共13页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料

双目立体视觉 综述.ppt
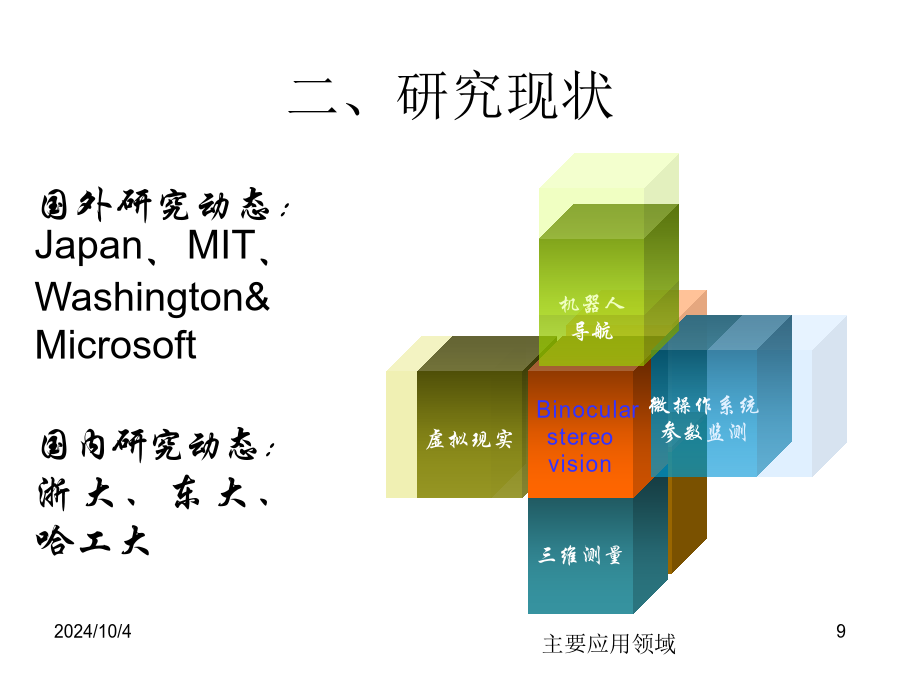
双目立体视觉Binocularstereovision参考文献(一)参考文献(二)参考文献(三)1、什么是视觉?2、什么是计算机视觉?3、什么是双目立体视觉?“双目”对于“单目”的优势学科异同点计算机视觉与其他领域的关系二、研究现状CNKI(知网)相关论文数据三、双目立体视觉研究方向双目立体视觉五大步骤Thankyou!

双目立体视觉及管口视觉测量系统研究的综述报告.docx
双目立体视觉及管口视觉测量系统研究的综述报告双目立体视觉及管口视觉测量系统是一种基于计算机视觉技术的三维扫描和测量系统,可以进行高精度的三维表面重建和测量。本文将对双目立体视觉及管口视觉测量系统的研究进展进行综述,主要包括基本原理、系统组成以及应用领域等方面。一、双目立体视觉测量系统双目立体视觉测量系统是一种基于两个相机的测量系统,旨在利用不同视角之间的差异来恢复三维物体的形状。其基本原理是,通过两个摄像头同时对同一物体进行拍摄,随后将图像进行配准和校正,最终得到三维点云数据。尽管双目视觉测量系统存在一些

双目立体视觉.ppt
哈工大创新立项答辩报告提纲立项背景研究内容实施方案进度安排预期目标团队成员谢谢

双目立体视觉.docx
计算机双目立体视觉双目立体视觉技术是仿照人类利用双目线索感知深度信息的方法,实现对三维信息的感知。为解决智能机器人抓取物体、视觉导航、目标跟踪等奠定基础。双目立体视觉(BinocularStereoVision)是机器视觉的一种重要形式,它是基于视差原理并利用成像设备从不同的位置获取被测物体的两幅图像,通过计算图像对应点之间的位置偏差,来获取物体三维几何信息的方法。融合两只眼睛获取的图像并观察它们之间的差别,使我们可以获得明显的深度感,建立特征间的对应关系,将同一空间物理点在不同图像中的映像点对应起来,这

基于双目立体视觉的立体匹配算法研究的综述报告.docx
基于双目立体视觉的立体匹配算法研究的综述报告双目立体视觉技术是通过模拟人类双眼来实现对三维场景的感知和理解。它通过两颗相机同时拍摄同一场景,然后利用图像处理算法对这两幅图像进行匹配和计算,从而得到场景中每个点的三维坐标。这种技术广泛应用于机器人、自动驾驶、虚拟现实等领域。本文将对基于双目立体视觉的立体匹配算法进行综述。一、立体匹配的基本原理立体匹配的目的是将两幅图像在图像像素级别上进行对应,以便计算它们所对应的空间点的位置。立体匹配方法通常包括以下几步:1.边缘检测:提取图像中的边缘特征,以便进行后续的匹