
玻璃生产线自动取板码垛机械手的研究的中期报告.docx

快乐****蜜蜂


1/2

2/2
在线预览结束,喜欢就下载吧,查找使用更方便
相关资料

玻璃生产线自动取板码垛机械手的研究的中期报告.docx
玻璃生产线自动取板码垛机械手的研究的中期报告本研究围绕玻璃生产线自动取板码垛机械手开展,旨在实现玻璃生产线自动化生产。目前研究工作已经完成了初步方案设计、机械手实物样机制作和相应软件编程等一系列工作。一、初步方案设计在进行初步方案设计时,我们按照玻璃生产线自动取板码垛的需求和基本原理,制定了初步的机械系统架构设计和控制方案设计。机械系统架构设计:本机械手由三部分组成,分别是横移机械手、纵移机械手和封板机械手,共同完成对玻璃板进行取材、码垛、定位等任务。控制方案设计:本研究采用了PLC作为核心控制器,并结合

玻璃生产线自动取板码垛机械手的研究.docx
玻璃生产线自动取板码垛机械手的研究论文:玻璃生产线自动取板码垛机械手的研究一、引言随着工业自动化的不断发展,机器替代人力已经越来越成为一种必然趋势。玻璃生产线自动取板码垛机械手就是其中的一个代表。它的出现不仅可以提高生产效率,还可以降低人员受伤的风险。二、玻璃生产线自动取板码垛机械手的设计原则1.功能性:玻璃生产线自动取板码垛机械手的主要功能是取板、码垛,因此,其设计应该以实现这些功能为主要考虑因素。2.精准性:玻璃是一种脆性物质,它的拆卸和码垛需要极高的精度。因此,机械手的设计应该具有高度精准的能力。3
自动夹取玻璃间隔纸机械手.pdf
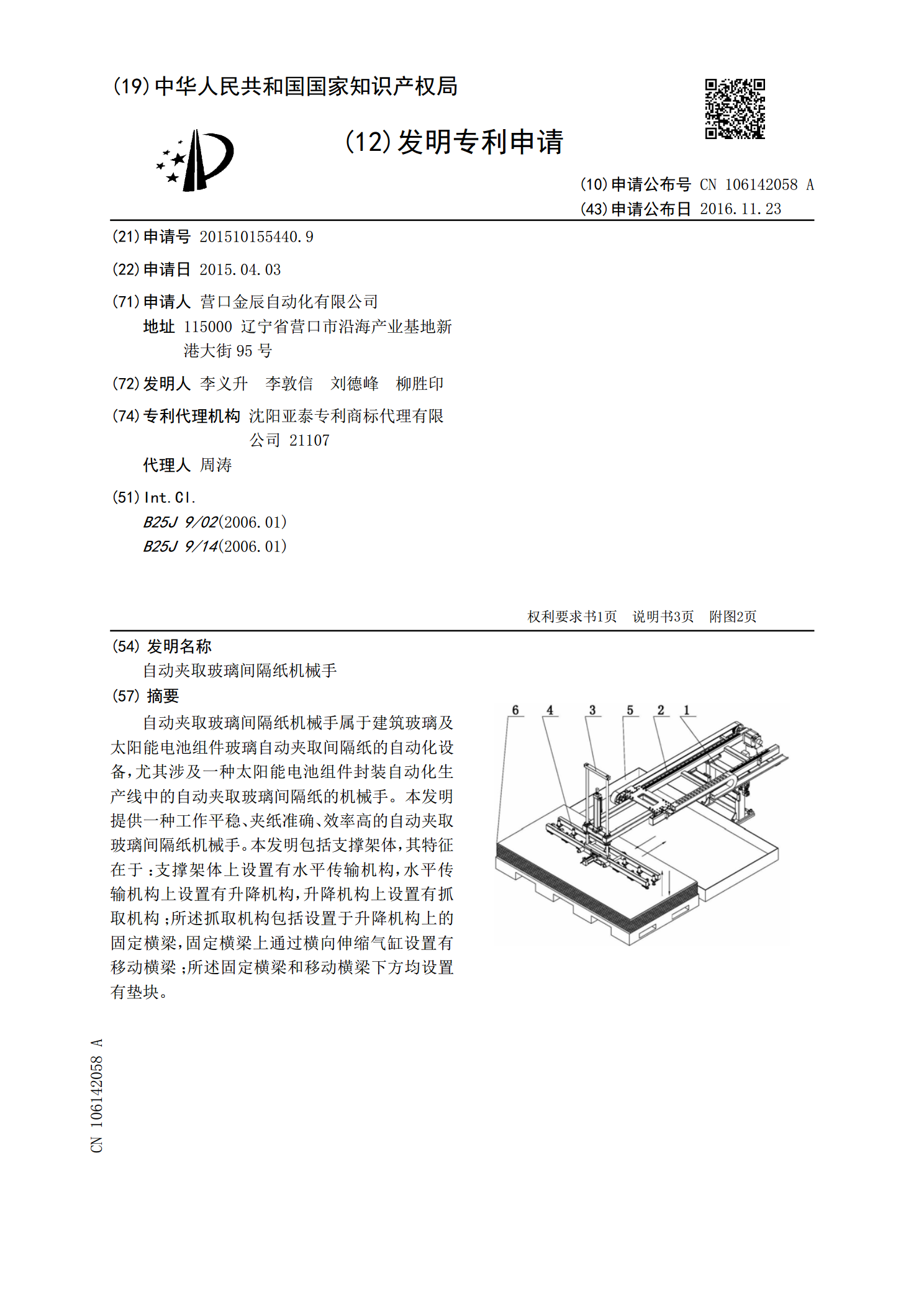
自动夹取玻璃间隔纸机械手属于建筑玻璃及太阳能电池组件玻璃自动夹取间隔纸的自动化设备,尤其涉及一种太阳能电池组件封装自动化生产线中的自动夹取玻璃间隔纸的机械手。本发明提供一种工作平稳、夹纸准确、效率高的自动夹取玻璃间隔纸机械手。本发明包括支撑架体,其特征在于:支撑架体上设置有水平传输机构,水平传输机构上设置有升降机构,升降机构上设置有抓取机构;所述抓取机构包括设置于升降机构上的固定横梁,固定横梁上通过横向伸缩气缸设置有移动横梁;所述固定横梁和移动横梁下方均设置有垫块。

抽屉板燕尾榫加工自动生产线用抽屉板取料机械手.pdf
本发明涉及一种抽屉板燕尾榫加工自动生产线用抽屉板取料机械手,包括框架式支撑架、回转台,回转台上安装有转盘,转盘上竖直安装有第一驱动装置;转盘的上表面固定安装有驱动臂,驱动臂的另一端连接伸缩臂,驱动臂和伸缩臂连接处设有第二驱动装置;伸缩臂的另一端连接取料臂,在伸缩臂和取料臂的连接处安装有第三驱动装置;在伸缩臂和取料臂的连接处安装有第四驱动装置;取料臂的端部安装有取料架,取料架上铰接安装有真空吸附取料机构,取料架上还安装有第五驱动装置。采用上述技术方案,具有结构紧凑、合理,操作简单,降低人力资源的使用,降低生

包装码垛自动生产线及控制系统研究的中期报告.docx
包装码垛自动生产线及控制系统研究的中期报告一、项目背景和目的近年来,随着生产制造业的发展,自动化生产已成为制造业发展的重要趋势。其中,包装码垛自动生产线已成为日益广泛应用的自动化生产线之一。为了提高生产效率、减少人力成本,并保障产品质量和安全,本项目旨在研究包装码垛自动生产线及控制系统,并提出相应的解决方案。二、项目进展本项目已完成项目计划书、前期调研和需求分析。根据需求分析,确定了包装码垛自动生产线的基本工作流程与功能要求,如下:1.自动化堆码。将成品从输送带上自动取下,进行堆码;2.手动搬运。运输从未