
气动视觉伺服定位系统研究的中期报告.docx

快乐****蜜蜂


1/2

2/2
在线预览结束,喜欢就下载吧,查找使用更方便
相关资料

气动视觉伺服定位系统研究的中期报告.docx
气动视觉伺服定位系统研究的中期报告中期报告研究背景及意义气动视觉伺服定位系统是一种集视觉、气动和控制技术于一体的高精度定位系统。在自动化生产线上,经常需要对工件进行定位、测量、检测等操作,而气动视觉伺服定位系统可以实现对工件的高精度定位和检测操作,具有广泛的应用前景。研究内容本研究的主要内容包括以下几个方面:1.气动驱动系统的设计和优化,包括气源装置、气缸、阀门和管路等。2.视觉识别系统的开发和应用,包括图像采集、图像处理和特征提取等。3.控制系统的设计和实现,包括PID控制算法、数据采集和处理等。4.实

基于视觉伺服的焊缝跟踪系统研究的中期报告.docx
基于视觉伺服的焊缝跟踪系统研究的中期报告一、研究背景:随着焊接技术的发展,焊接质量和效率成为焊接过程中的重要问题。焊缝跟踪系统是提高焊接效率和质量的重要手段之一,其通过对焊缝进行精准跟踪,实现焊接自动化和智能化。在焊缝跟踪系统中,视觉伺服是一种常用的控制方式,具有实时性好、鲁棒性强等特点,可以有效提高焊接的精度和稳定性。因此,基于视觉伺服的焊缝跟踪系统成为研究的热点之一。二、研究内容:1.系统架构设计本研究的焊缝跟踪系统采用了基于视觉伺服的控制方式。系统由图像采集模块、图像处理模块、控制模块和执行器模块四

移动机器人的视觉伺服系统研究的中期报告.docx
移动机器人的视觉伺服系统研究的中期报告本中期报告针对移动机器人的视觉伺服系统进行了研究和分析,并提出了相关的实现方案。一、研究背景和意义移动机器人作为一种智能化的机器人,已广泛应用在各个领域,如:制造业、医疗卫生、安全保障等。在移动机器人的应用中,视觉伺服系统在定位、识别等方面有着重要的作用,但是目前移动机器人视觉伺服系统还面临许多挑战,主要体现在以下几个方面:1.视觉传感器精度不够,难以满足实际应用的需求;2.视觉算法处理效率低,无法实现实时控制;3.移动机器人姿态变化大,难以准确度量其中的运动学和动力

基于机器视觉的探针自动定位测试系统研究的中期报告.docx
基于机器视觉的探针自动定位测试系统研究的中期报告一、研究背景与意义自动化测试技术在工业生产中有着广泛应用,其优势在于能够提高测试效率和准确率,减少人工干预,因此越来越受到重视。其中,探针测试技术是自动化测试技术的一个重要方向。探针测试技术是指通过探针接触被测试物体的表面,进行测量或测试的一种方法。这种方法具有测量准确、快速、便捷的特点,因此被广泛应用于电子元器件、电路板等领域的测试中。针对探针测试技术应用的需要,目前已经出现了很多探针自动定位测试系统。探针自动定位测试系统是一种通过机器视觉技术,自动发现并
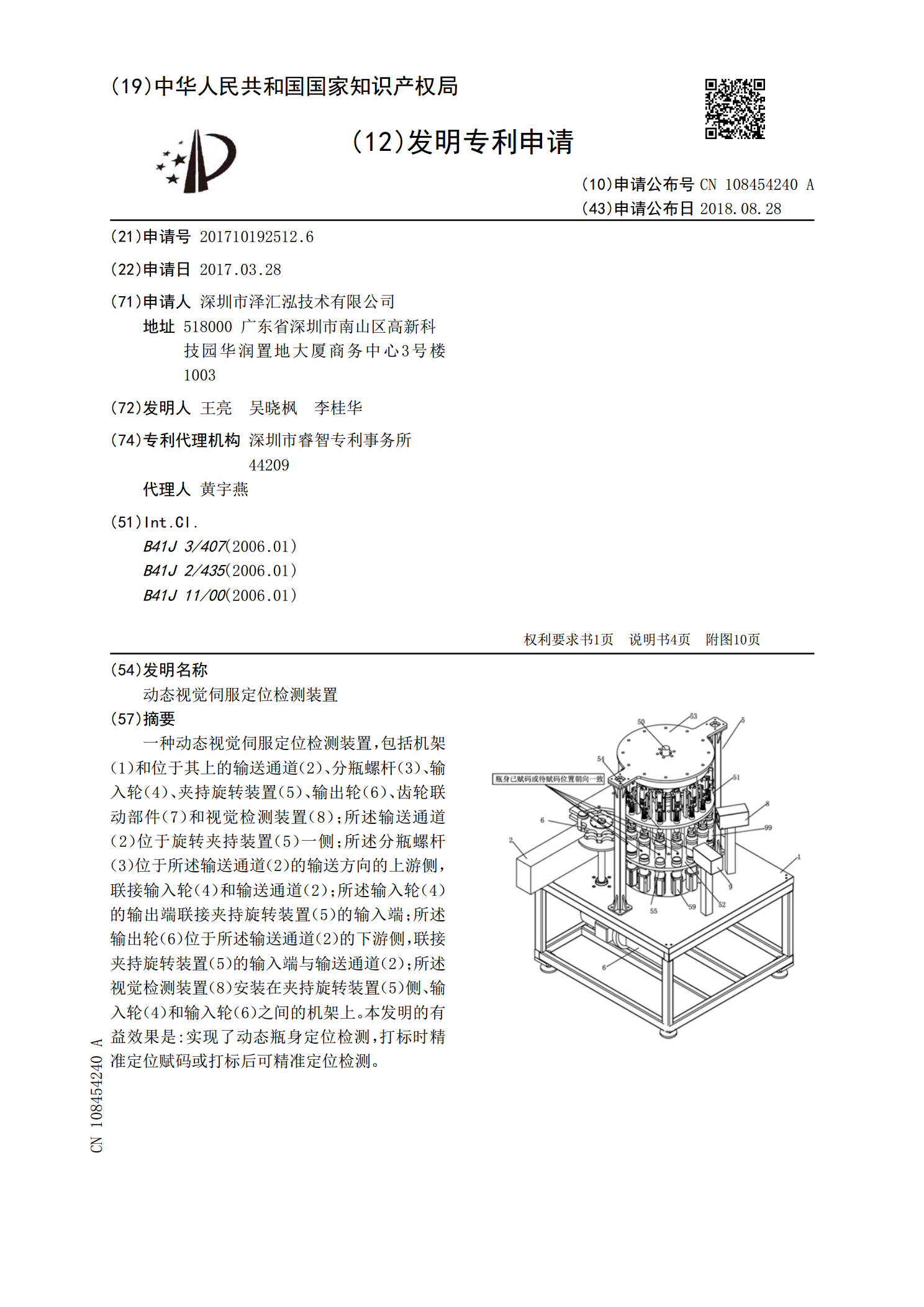
动态视觉伺服定位检测装置.pdf
一种动态视觉伺服定位检测装置,包括机架(1)和位于其上的输送通道(2)、分瓶螺杆(3)、输入轮(4)、夹持旋转装置(5)、输出轮(6)、齿轮联动部件(7)和视觉检测装置(8);所述输送通道(2)位于旋转夹持装置(5)一侧;所述分瓶螺杆(3)位于所述输送通道(2)的输送方向的上游侧,联接输入轮(4)和输送通道(2);所述输入轮(4)的输出端联接夹持旋转装置(5)的输入端;所述输出轮(6)位于所述输送通道(2)的下游侧,联接夹持旋转装置(5)的输入端与输送通道(2);所述视觉检测装置(8)安装在夹持旋转装置(