
雷达一维距离像特征提取与识别方法研究的综述报告.docx

快乐****蜜蜂


1/2

2/2
在线预览结束,喜欢就下载吧,查找使用更方便
相关资料

雷达一维距离像特征提取与识别方法研究的综述报告.docx
雷达一维距离像特征提取与识别方法研究的综述报告雷达一维距离像特征提取和识别是雷达信息处理中的重要问题,其目的是从雷达海量数据中提取出对目标物理特性有识别作用的特征,实现对目标的分类和识别。本文对雷达一维距离像特征提取和识别方法的研究进行综述。一、特征提取方法一维雷达距离像中的目标特征包括目标的尺寸、形状、反射率等。本节将介绍常见的一维距离像特征提取方法。1.傅里叶变换傅里叶变换是一种常用的信号处理方法,可以将时域信号转变为频域信号,并且不会损失原始信号信息。一维距离像在进行傅里叶变换后可以获得目标反射率和

雷达一维距离像特征提取与识别方法研究的开题报告.docx
雷达一维距离像特征提取与识别方法研究的开题报告开题报告一、选题背景和研究意义随着雷达技术的不断发展和应用,雷达成为了很多领域不可或缺的工具。雷达能够实现对目标的探测、跟踪、识别等功能,在军事、航空、海洋、交通、环境监测等多个领域应用广泛。在雷达图像中,目标的特征提取和识别是解决很多问题的基础和关键。本文针对雷达一维距离像特征提取与识别方法进行研究,旨在探讨雷达一维距离像中目标的特征提取和识别方法,进一步提高雷达目标探测、识别的准确性和可靠性,为实际应用提供技术支持。二、研究内容和方法(一)研究内容本文的研
雷达目标一维距离像智能识别方法.pdf
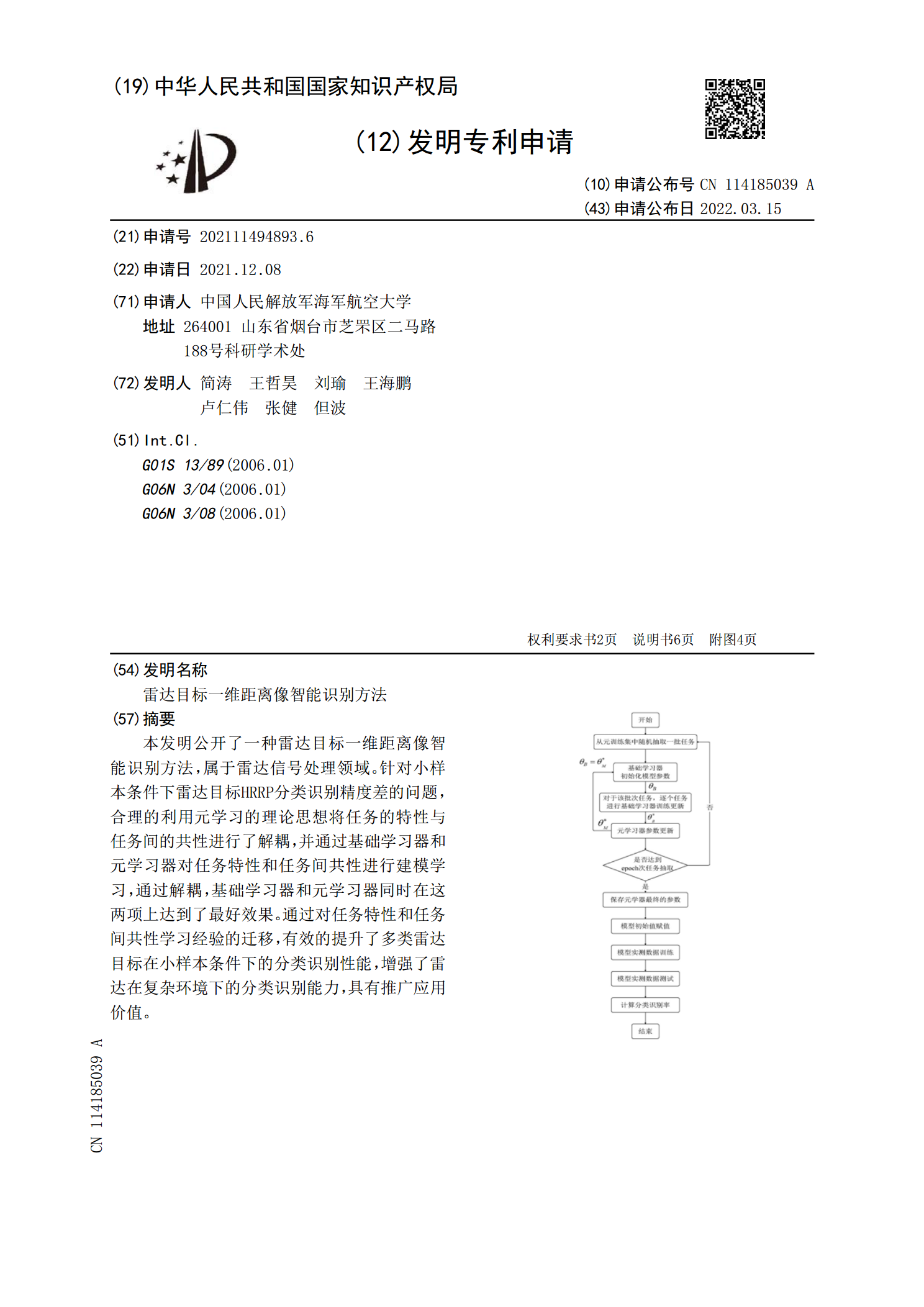
本发明公开了一种雷达目标一维距离像智能识别方法,属于雷达信号处理领域。针对小样本条件下雷达目标HRRP分类识别精度差的问题,合理的利用元学习的理论思想将任务的特性与任务间的共性进行了解耦,并通过基础学习器和元学习器对任务特性和任务间共性进行建模学习,通过解耦,基础学习器和元学习器同时在这两项上达到了最好效果。通过对任务特性和任务间共性学习经验的迁移,有效的提升了多类雷达目标在小样本条件下的分类识别性能,增强了雷达在复杂环境下的分类识别能力,具有推广应用价值。

基于核函数的雷达一维距离像目标识别方法研究的开题报告.docx
基于核函数的雷达一维距离像目标识别方法研究的开题报告一、研究背景和意义雷达(RadioDetectionAndRanging)是指一种利用电磁波进行探测和测量的技术手段,广泛应用于军事、民用、科研等各个领域。其中,雷达目标识别是制胜的关键之一,因此如何通过雷达信号数据进行目标识别成为研究的热点之一。目前,传统的雷达目标识别技术主要包括振荡器比对、调制识别、脉冲重叠等方式,但这些方法对于复杂目标的识别效果并不理想。近年来,基于核函数的目标识别算法逐渐成为雷达目标识别的研究热点。基于核函数的方法通过将雷达信号

全极化雷达高分辨距离像目标识别方法研究的任务书.docx
全极化雷达高分辨距离像目标识别方法研究的任务书任务书任务名称:全极化雷达高分辨距离像目标识别方法研究任务背景:全极化雷达已经广泛应用于目标识别和成像领域,是一种非常重要的电子设备。在大多数应用领域中,高分辨距离像目标识别是极其重要的任务。全极化雷达技术可以高精度地测量物体在各种极化状态下的雷达反射特性,通过这些反射特性,可以准确推断目标的形状、材料类型、方向等物理参数。因此,全极化雷达技术在军事、航空、航天、地球观测等多个领域具有深远的应用前景。任务目标:本任务的目标是研究全极化雷达高分辨距离像目标识别方