
雷达目标一维距离像智能识别方法.pdf

St****12

1/10
2/10
3/10
4/10
5/10
6/10
7/10

8/10
9/10
10/10
亲,该文档总共13页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料
雷达目标一维距离像智能识别方法.pdf
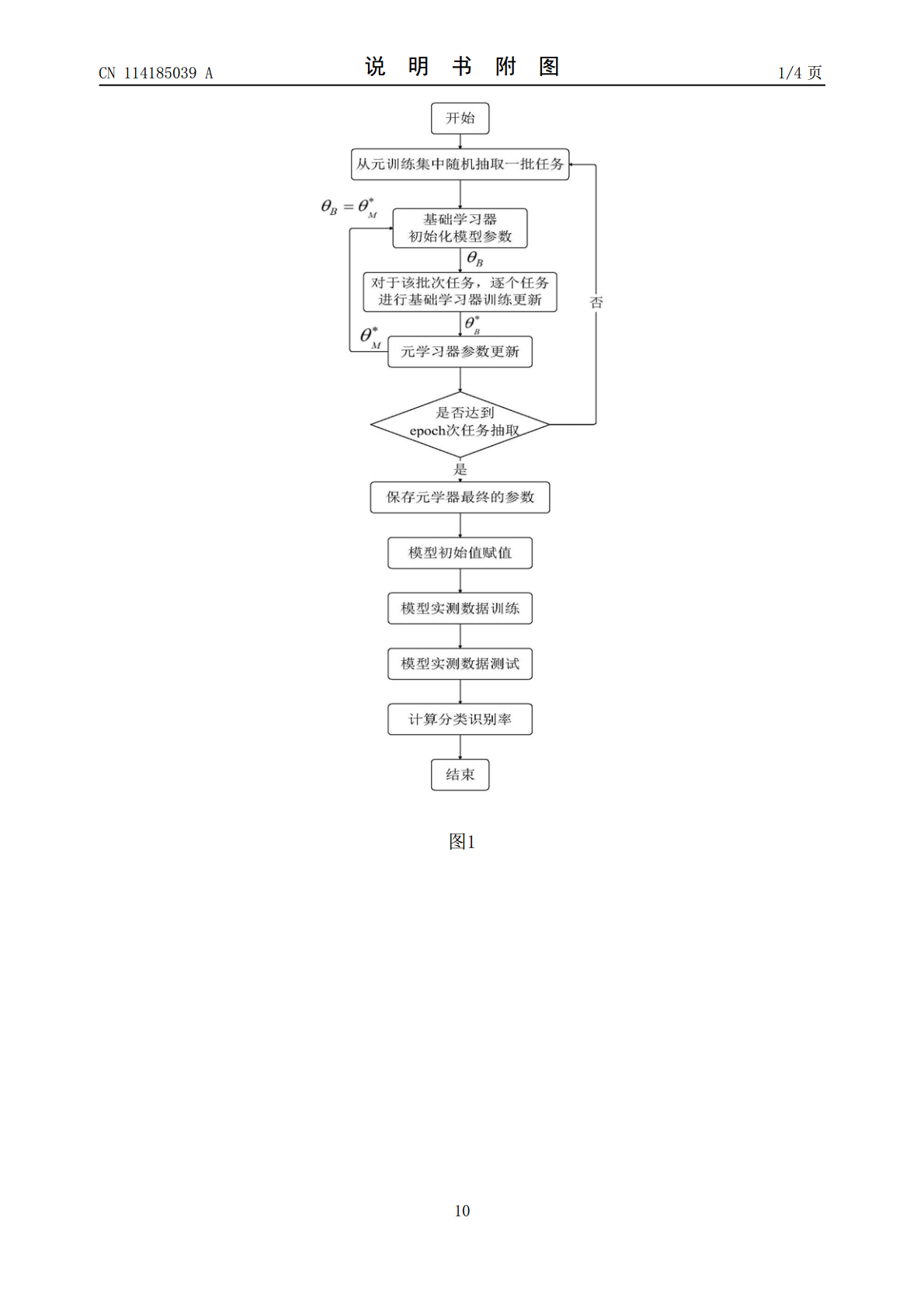
本发明公开了一种雷达目标一维距离像智能识别方法,属于雷达信号处理领域。针对小样本条件下雷达目标HRRP分类识别精度差的问题,合理的利用元学习的理论思想将任务的特性与任务间的共性进行了解耦,并通过基础学习器和元学习器对任务特性和任务间共性进行建模学习,通过解耦,基础学习器和元学习器同时在这两项上达到了最好效果。通过对任务特性和任务间共性学习经验的迁移,有效的提升了多类雷达目标在小样本条件下的分类识别性能,增强了雷达在复杂环境下的分类识别能力,具有推广应用价值。

基于核函数的雷达一维距离像目标识别方法研究的开题报告.docx
基于核函数的雷达一维距离像目标识别方法研究的开题报告一、研究背景和意义雷达(RadioDetectionAndRanging)是指一种利用电磁波进行探测和测量的技术手段,广泛应用于军事、民用、科研等各个领域。其中,雷达目标识别是制胜的关键之一,因此如何通过雷达信号数据进行目标识别成为研究的热点之一。目前,传统的雷达目标识别技术主要包括振荡器比对、调制识别、脉冲重叠等方式,但这些方法对于复杂目标的识别效果并不理想。近年来,基于核函数的目标识别算法逐渐成为雷达目标识别的研究热点。基于核函数的方法通过将雷达信号

一种基于宽度学习的雷达高分辨距离像目标识别方法.pdf
本发明公开了一种基于宽度学习的雷达高分辨距离像目标识别方法,包括:获取高分辨距离像数据并生成训练集;构建宽度学习模型;利用所述训练集对所述宽度学习模型进行训练,得到经训练的宽度学习模型;利用所述经训练的宽度学习模型对待识别的原始高分辨距离像数据进行识别,获取识别结果。本发明使用宽度学习模型对雷达高分辨距离像数据的高维特征进行提取,在保证识别精度的前提下,可以快速地对雷达目标进行识别,在预测精度、识别时间方面有着较为明显的优势。

全极化雷达高分辨距离像目标识别方法研究的任务书.docx
全极化雷达高分辨距离像目标识别方法研究的任务书任务书任务名称:全极化雷达高分辨距离像目标识别方法研究任务背景:全极化雷达已经广泛应用于目标识别和成像领域,是一种非常重要的电子设备。在大多数应用领域中,高分辨距离像目标识别是极其重要的任务。全极化雷达技术可以高精度地测量物体在各种极化状态下的雷达反射特性,通过这些反射特性,可以准确推断目标的形状、材料类型、方向等物理参数。因此,全极化雷达技术在军事、航空、航天、地球观测等多个领域具有深远的应用前景。任务目标:本任务的目标是研究全极化雷达高分辨距离像目标识别方
基于注意力变换网络的雷达高分辨距离像目标识别方法.pdf
本发明公开了一种基于注意力变换网络的雷达高分辨距离像目标识别方法,主要解决现有技术对雷达高分辨距离像识别时,难以关注雷达高分辨距离像的局部细节,难以聚焦于雷达高分辨距离像中更具可分性的目标区域,难以利用其全局时序信息,识别正确率较低,识别性能受限等问题。实现步骤为:(1)生成训练集;(2)构建注意力变换网络;(3)训练注意力变换网络;(4)对待分类的雷达高分辨距离像目标进行识别。本发明同时利用了高分辨距离像的局部细节特征与全局时序信息,对高分辨距离像不同距离单元的重要性进行了区分,使得本发明有效提高了高分